最終更新:2016/09/12
次はレイアウトに移っていよいよIKを設定する。一般には略してIKと呼ばれるけど、正式にはインバース・キネマティクス(Inverse Kinematics)と言い、関節等によって多重階層構造を持つモデルの末端部分の位置を先に決めることによってその上位階層の要素の位置を逆算的に求める技法。
普通、階層構造を持っているモデルの場合は上位の要素から順に位置を決めていかないと末端要素の位置は決まらないものなんだけど、例えば人間の足のように全長が決まっていて基本的に伸び縮みしないものである場合、目測を誤ると足が宙に浮いてしまったり、逆に地面に埋まってしまったりといった事態が起こる。すると、上位階層に戻って調整をやり直すことになり、単に歩くだけの動作ひとつにも非常に手間がかかる。
上位階層から順に位置を決めていく方法をIKに対してFK(Forward Kinematics)と言う。FKはアクション・フィギュアのような人形や人型ロボットのプラモデルにポーズをとらせる時に手足の関節を上から順に曲げていく感覚に近い。ただし、CGの世界には物理演算を使わない限り重力がないため、重心の位置や左右の荷重バランスをとらなくても立ってしまい、作品として捉えた時に違和感のないポーズをとらせるのが逆に難しい。
一方、実際の人間は自分の手を差しだそうとした場合や、足を一歩踏み出そうとした場合に、手や足の未来位置を意識することはあっても、その時に肩、肘、股や膝の関節をどのくらい曲げようかということまでは通常意識しない。IKは「足を持ち上げて50cm前へ進ませる」といった人間にとっては当たり前の動作を上位階層を必要以上に意識せずに実現するものだと思ってもらえれば一番わかりやすい。動画などで反復運動が多い作品を作る際に非常に役立つものだけど、静止画の場合でも有用なことが多い。
準備と前提
 前置きはこのくらいにして、レイアウトを起動する。まず最初に、「その場でペアレント(Parent in Place)」がオンになっているかどうかを確認する。オフになっている場合はボタンをクリックし、トグルしてオンにしておく。
前置きはこのくらいにして、レイアウトを起動する。まず最初に、「その場でペアレント(Parent in Place)」がオンになっているかどうかを確認する。オフになっている場合はボタンをクリックし、トグルしてオンにしておく。
これがオンになっていないと、2つのオブジェクトに親子関係を結ばせた時に親オブジェクトの座標を基準とした相対座標が計算されず、子オブジェクトの絶対座標がそのまま相対座標に代入されるため、子オブジェクトの位置が動いて定まらなくなってしまう。親子双方のオブジェクトが原点から離れている場合、子オブジェクトが画面外へ飛んでいってしまうこともあるので、親子関係を設定したと同時にオブジェクトの挙動がおかしくなったらまずこの設定を疑う。
また、普段からモーションキーを手動で作成するのを習慣にしているため、新しいオブジェクトを配置するたびにモーションキーを作成している。自動作成モードにすればモーションキーを作成する煩わしさから解放されるけど、常に自動にしているとモーションキーのことを意識しなくなることがあるので要注意。不自然な動きをする時はキーを手動で作成し直すとオブジェクトの挙動が改善することがある。
なお、記述が煩雑になるのを防ぐため、下半身系のボーン構造は次のとおりになっていることを前提とする。
- Root
- Hip
- Coxa_L
- Upper_Leg_L
- Lower_Leg_L
- Ankle_L(IK用)
- Foot_L
- Toe_L
- FootIK_L(IK用)
- Toe_L
- Foot_L
- Ankle_L(IK用)
- Lower_Leg_L
- Upper_Leg_L
- Coxa_R
- Upper_Leg_R
- Lower_Leg_R
- Ankle_R(IK用)
- Foot_R
- Toe_R
- FootIK_R(IK用)
- Toe_R
- Foot_R
- Ankle_R(IK用)
- Lower_Leg_R
- Upper_Leg_R
- Coxa_L
- Hip
以下、特に断りがない限り、0フレームで操作する。
スケルゴンからボーンへの変換
モデラーでスケルゴンとしてボーンを組み込み、ボーン・ウェイトを設定したオブジェクト本体を呼び出す。体や髪の毛はもちろん、服装も含むオブジェクトのすべての構成要素がひとつのレイヤーにまとめられていて、更にボーンも同一レイヤーに組み込まれていることが前提。
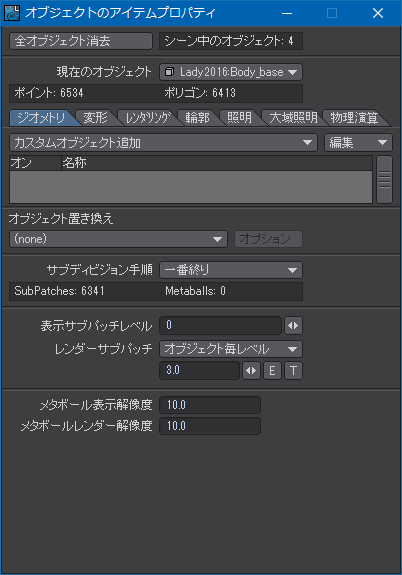
オブジェクト本体のプロパティを開き、「表示サブパッチレベル」を「1」又は「0」にする。マシンパワーに余裕のあるPCの場合は「3」のままでも問題ないけど、ボーンの旋回などの結果が反映されるまでに時間がかかるので、表示品質は落ちるけど表示サブパッチレベルは下げておいたほうが能率は良くなる。「サブディビジョン手順」は「一番終り」に設定する。サブディビジョン手順をボーンによる変形などの後にすることによって、まっすぐなストローを無理に折り曲げた時のような関節の潰れを防止できる。
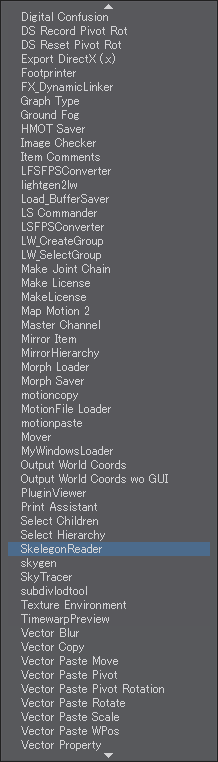
オブジェクトを選択した状態で、「ユーティリティ」メニューグループからプラグインを選択し、「SkelegonReader」を選択する。普通は「スケルゴン変換」を使うんだけど、ボーンを組んだ時にスケルゴンエディターでバンクをZ軸方向に揃えた操作が反映されないため、SkelegonReaderを使う。
次の画像のようなダイアログが表示されるけど、「Yes」で問題ない。
ボーンがオブジェクト本体に完全に埋まっている場合は見た目にはわかりにくいかもしれないけど、組み込まれたボーンはモデラーで組んだ階層構造のとおりにすべてオブジェクト本体の配下に設定されている。
ボーンが読み込まれたら、オブジェクト本体は一時的に必要なくなるので、Scene Editorを使ってオブジェクト本体を「Hidden」に設定して、レイアウト画面に表示されないようにする。
腰コントロールの設定
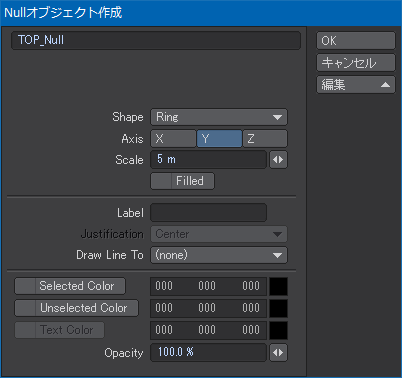
次に、すべてのオブジェクトの頂点に位置する最初のNullオブジェクトを作成する。「アイテム」メニューグループの「追加」から「Null」を選択する。名称はなんでもいいけど、「TOP_Null」とした。「Shape」は「Ring」、「Axis」は「Y」に設定する。「Scale」はモデルの大きさに対して見やすい大きさにしておく。後でアイテムプロパティの「ジオメトリ」で変更することもできるので、間違ってデフォルト設定で作成してしまっても削除してやり直す必要はない。
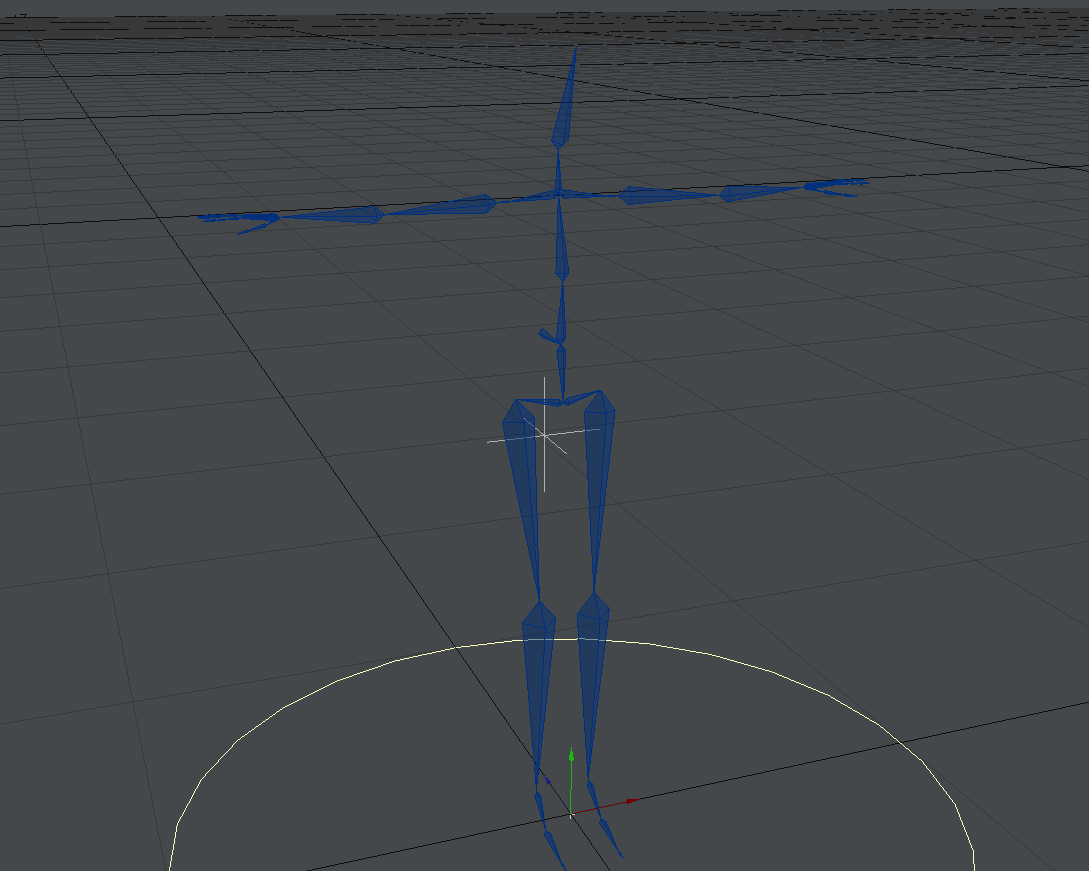
次の画像のように足下にNullオブジェクトが作られた。
作成したNullオブジェクトをひとつ複製(Ctrl+C)し、名称を変更する。腰の高さに設定するものなので、「Waist_Null」とした。
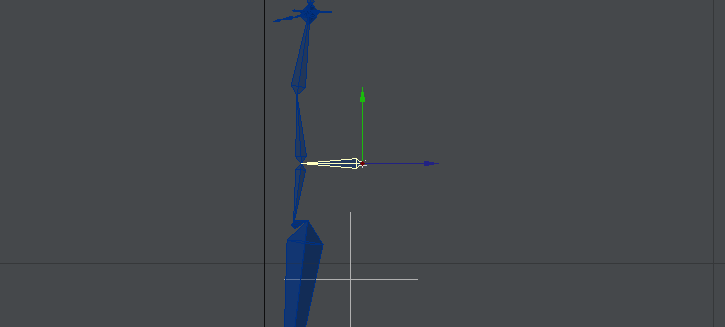
Rootボーンを選択し、Y座標をコピーする。コピーした座標をWaist_NullのY座標にペーストする。次の画像はRootボーンを横から見た図。
Waist_NullがRootボーンと同じ高さになったら、Enterキーを何回か押し、モーションキーを作成する。更に、RootボーンのZ座標をコピーし、同様にWaist_NullのZ座標に貼り付ける。再度モーションキーを作成するのを忘れずに。
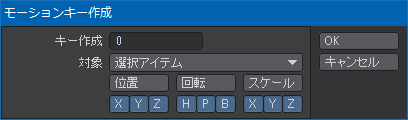
モーションキーを自動作成モードにしている場合は逐一キーを作成する必要はないけど、何か操作する度に勝手にキーが作られてしまうので、操作すべきフレームを間違えた時にキーを削除しなければならず、どちらが便利とは一概には言い難い。
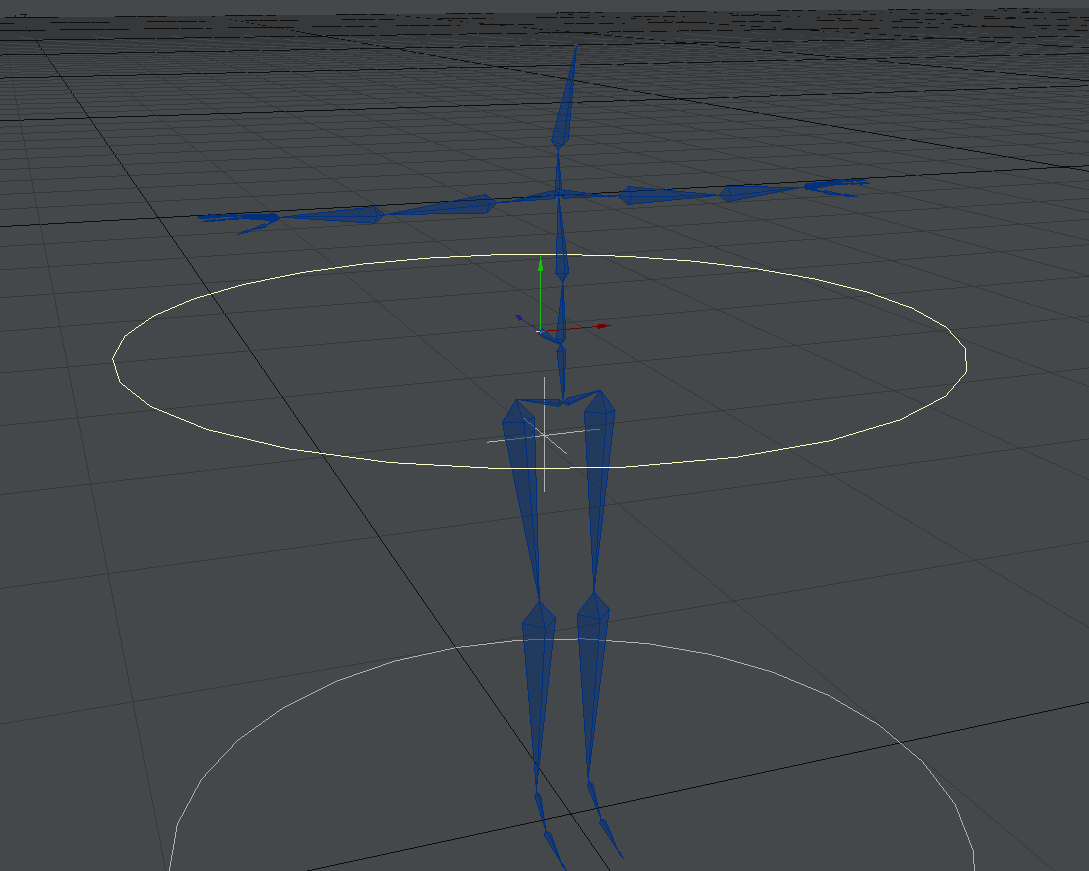
Waist_Nullの座標が決まると、次の画像のようになっている。
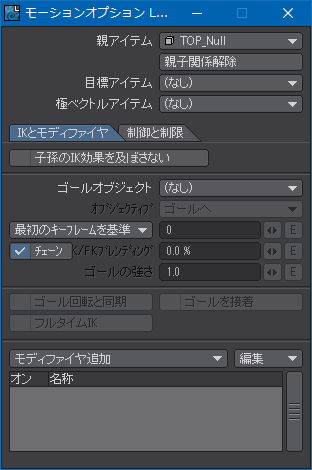
再びRootボーンを選択し、モーションオプション(Mキー)を開く。「モディファイヤ追加」をクリックし、ドロップダウンメニューから「Follower」を選択する。追加できたら、名称欄を右クリックして「プロパティ」を選択する。
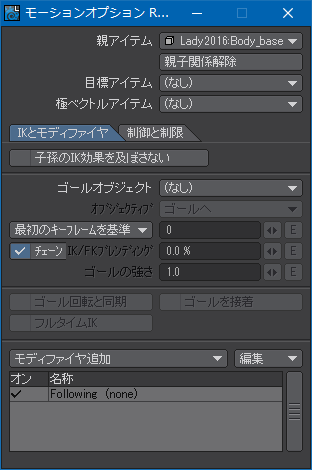
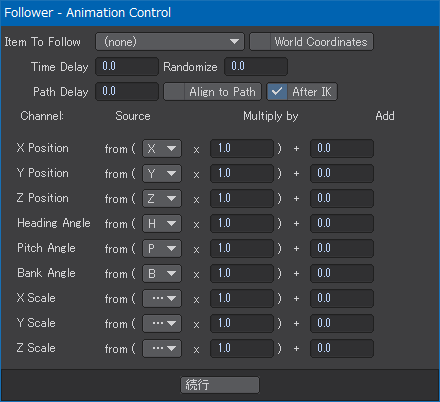
Followerコントロールを開くと、次の画像のように表示される。
「After IK」のチェックを外し、「Item to Follow」に「Waist_Null」を指定する。また、Z PositionにRootボーンのZ座標を入力する。左下に表示されているので、それをそのまま入力すればいい。メートル単位なので、600mmならば「0.6」と入力する。回転角度やスケールの設定は三角をクリックし、「(none)」を選択して無効にしておく。
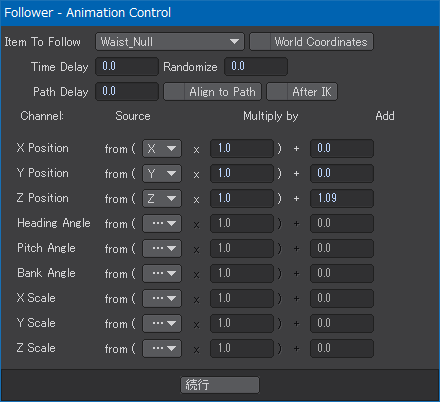
「続行」をクリックすると、RootボーンはWaist_Nullの動きに追随するようになる。
左足IKの設定
足のIK設定のおおまかな流れは、ゴールオブジェクトになるNullオブジェクトの作成、IK用のボーンからゴールオブジェクトを参照する設定、IKで動くボーンの指定、及びIKが及ぶ範囲の限定という4つの手順からなる。
左足ゴールオブジェクト
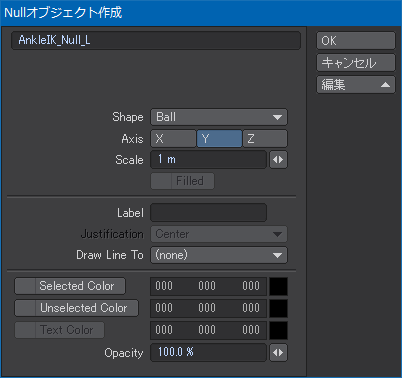
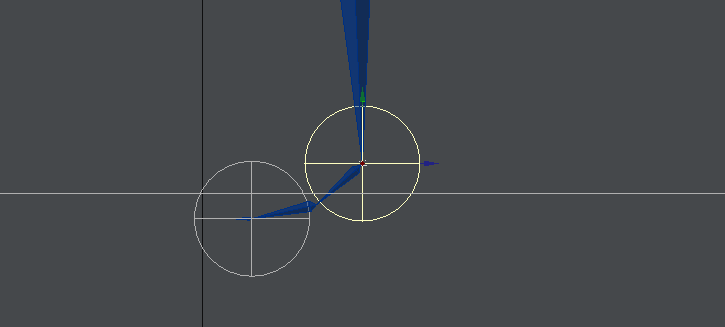
まず、ゴールオブジェクトになるNullオブジェクトを追加する。くるぶしに当たる箇所に使うので、名称は「AnkleIK_Null_L」とした。形状は「Ball」にしたけど、好みで変更して構わない。後で選択しやすいように大きさは足の幅よりも大きくなるようにする。
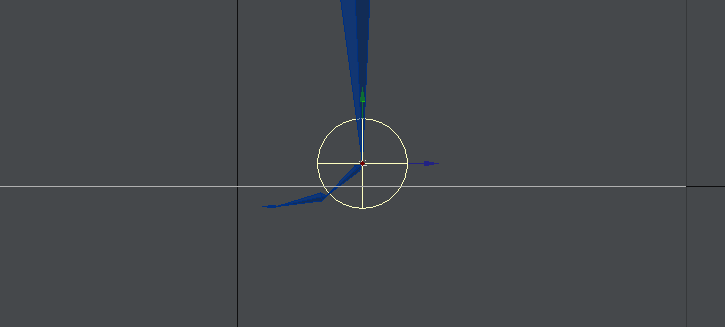
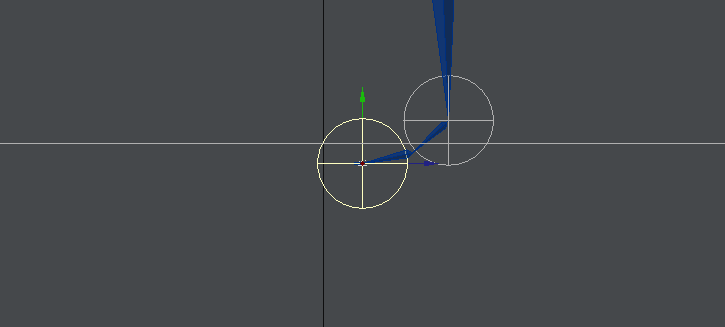
原点に作成されたAnkleIK_Null_LをAnkle_Lボーンの根元に配置する。矢印を掴むとひとつの軸方向にしか動かせなくなってしまうので、中間の円弧あたりをAltキーを押しながら掴み、ボーンの根元にスナップさせる。Ankle_Lボーンは短いので、根元にスナップできているかわかりづらい時は拡大して確認する。位置が決まったらモーションキーを作成する。
同様にして「FootIK_Null_L」オブジェクトを作成し、Altキーを押しながらFootIK_Lボーンの根元にスナップさせる。しつこいようだけど、モーションキーも忘れずに作成する。
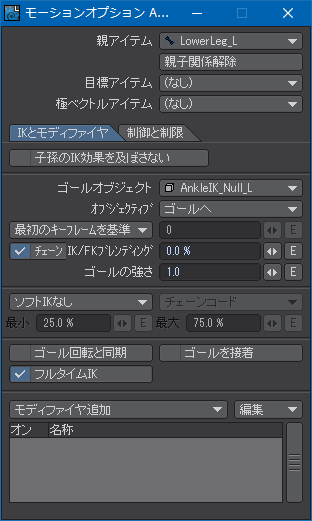
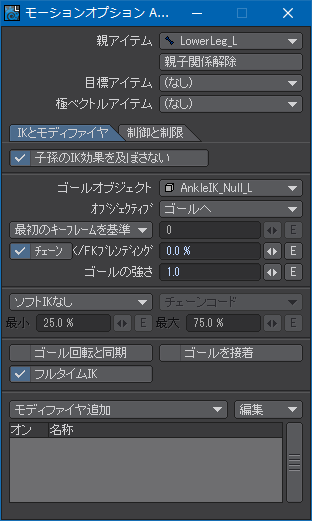
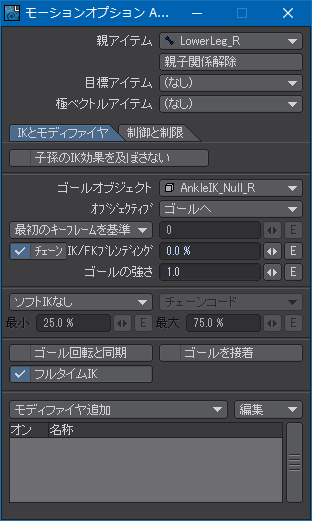
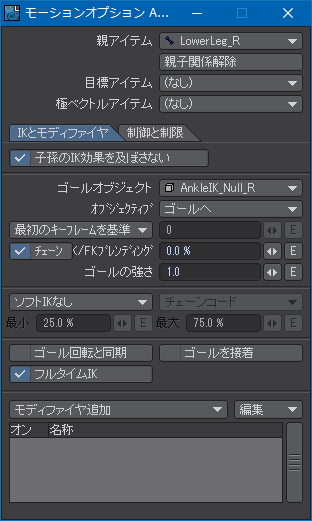
Ankle_Lボーンを選択し、モーションオプション(Mキー)を開く。「ゴールオブジェクト」に先ほど作成したAnkleIK_Null_Lを指定する。
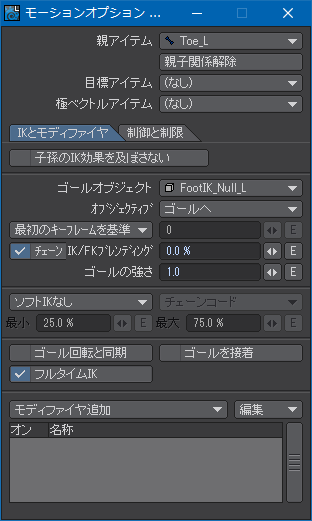
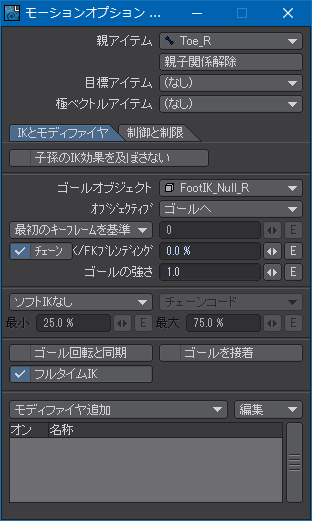
同様にFootIK_Lボーンを選択し、モーションオプション(Mキー)で「ゴールオブジェクト」をFootIK_Null_Lに指定する。
左足IKの屈伸設定
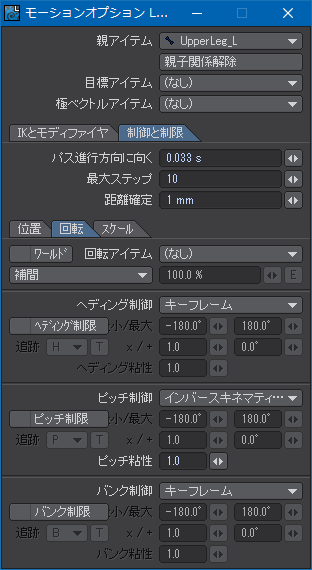
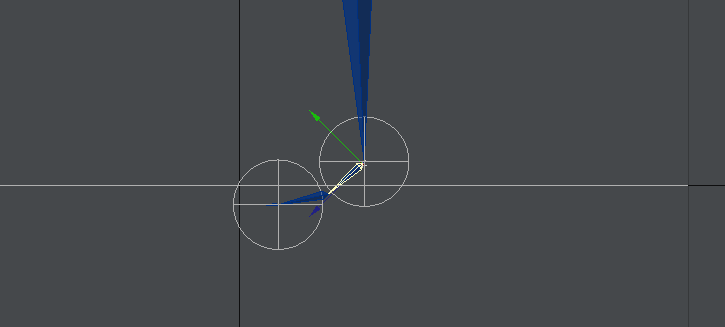
次に、IKで自動的に屈伸するボーンを指定する。太ももにあたるUpper_Leg_Lボーンを選択する。
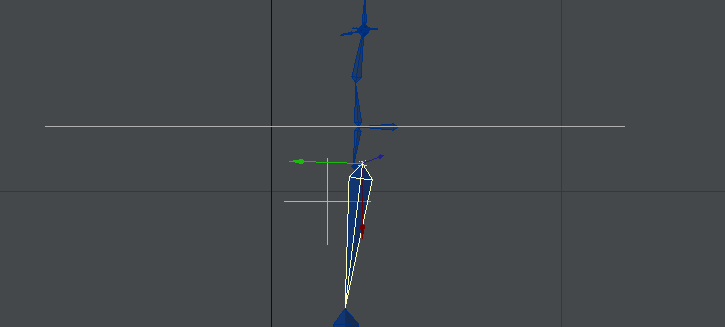
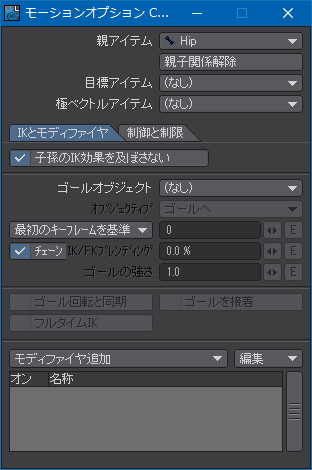
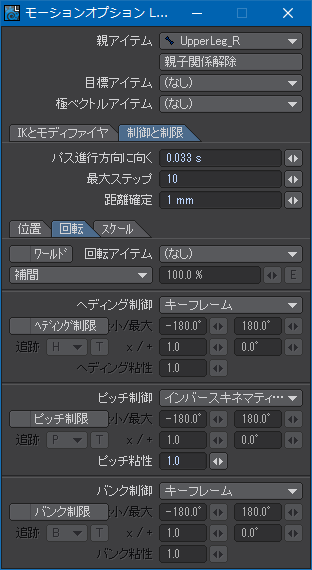
モーションオプション(Mキー)で「制御と制限」タブを選択し、「ヘディング制御」と「ピッチ制御」を「インバースキネマティクス」に指定する。バンク制御は変更しない。股関節にあたる部分の設定で、足を前後に持ち上げる方向と、足を左右に広げる方向の両方についてIKを有効にする。
続けてふくらはぎ又は脛にあたるLower_Leg_Lボーンを選択する。
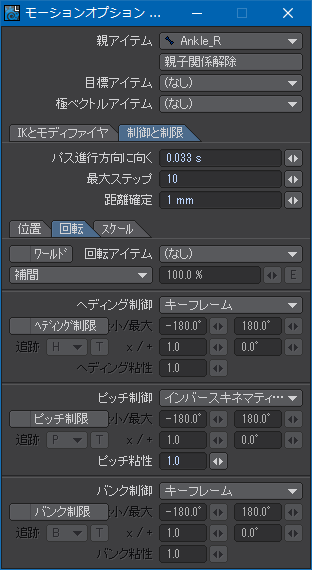
モーションオプション(Mキー)の「制御と制限」タブで「ピッチ制御」のみを「インバースキネマティクス」に指定する。ヘディング制御及びバンク制御は変更しない。膝は曲がる方向が決まっているので、前後に曲げる方向だけに制限する。
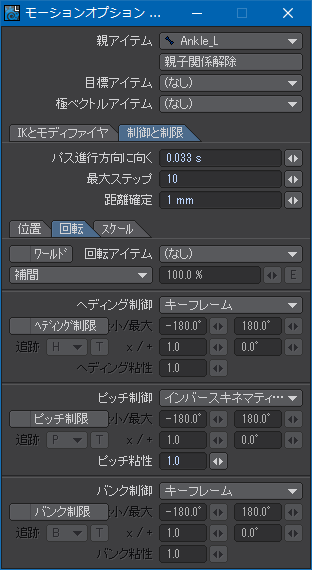
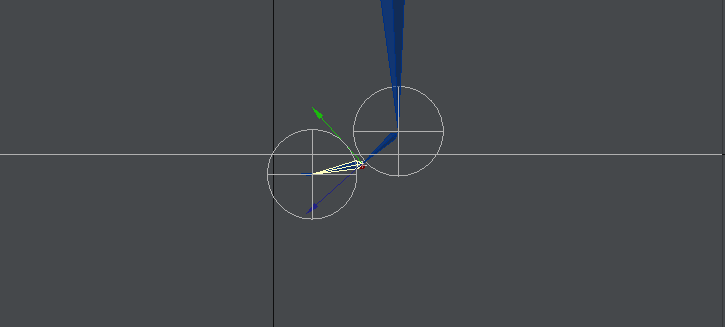
足首から下にもIKを設定する。足首から下の足にあたるFoot_Lボーンを選択する。
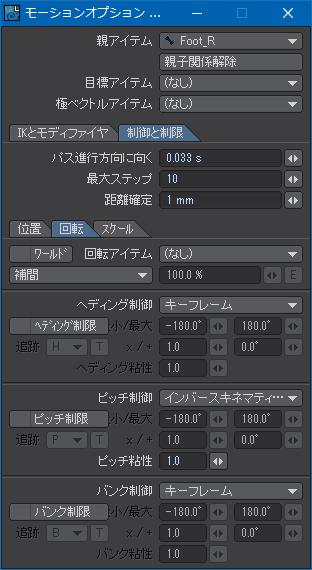
モーションオプション(Mキー)の「制御と制限」タブで「ピッチ制御」のみを「インバースキネマティクス」に指定する。ヘディング制御及びバンク制御は変更しないけど、ピッチ制御だけだと足首は曲げ伸ばしの方向にだけしかIKが効かないことになるため、足を大きく投げ出すようなダイナミックなポーズをとらせたい場合などはヘディング制御にもIKを有効にしておく。
爪先にあたるToe_Lボーンを選択する。
モーションオプション(Mキー)の「制御と制限」タブで「ピッチ制御」のみを「インバースキネマティクス」に指定する。ヘディング制御及びバンク制御は変更しない。
左足IKの停止設定
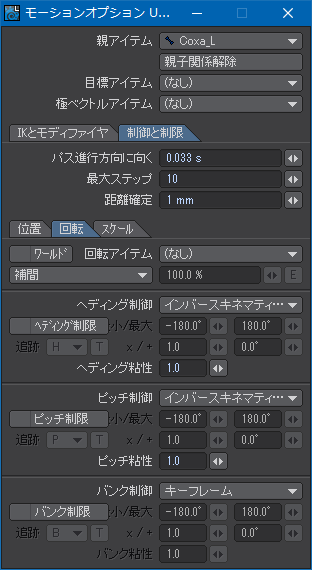
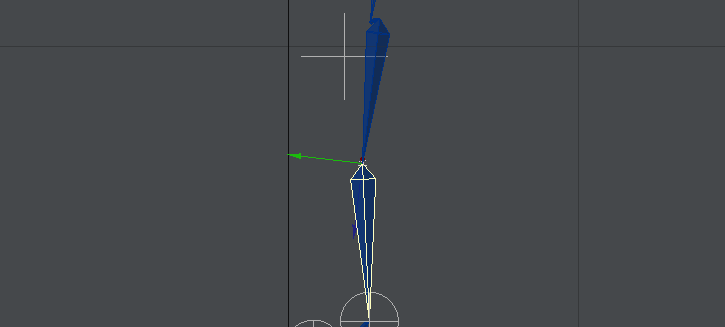
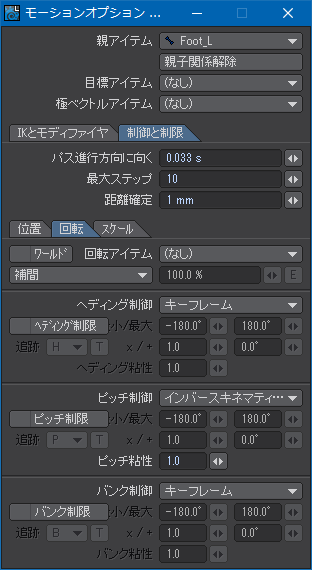
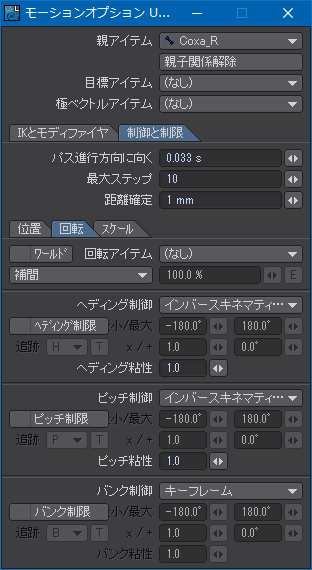
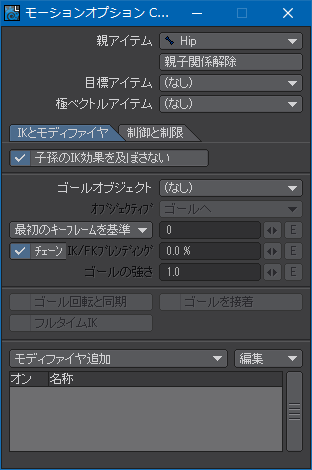
太もものUpper_Leg_Lボーンの更に上位に位置する、腰骨にあたるCoxa_Lボーンを選択する。モーションオプション(Mキー)で「子孫のIK効果を及ぼさない」にチェックする。これは、IKによる足の屈伸が腰から上のボーンに影響を及ぼさないようにするための設定。IKでは「IKによる自動変形をどこで止めるか」という情報が必要になる。言い換えると、IKの固定軸をどこにするかの指定ということになる。
再びAnkle_Lボーンを選択し、モーションオプション(Mキー)で「子孫のIK効果を及ぼさない」にチェックする。
親子関係の設定
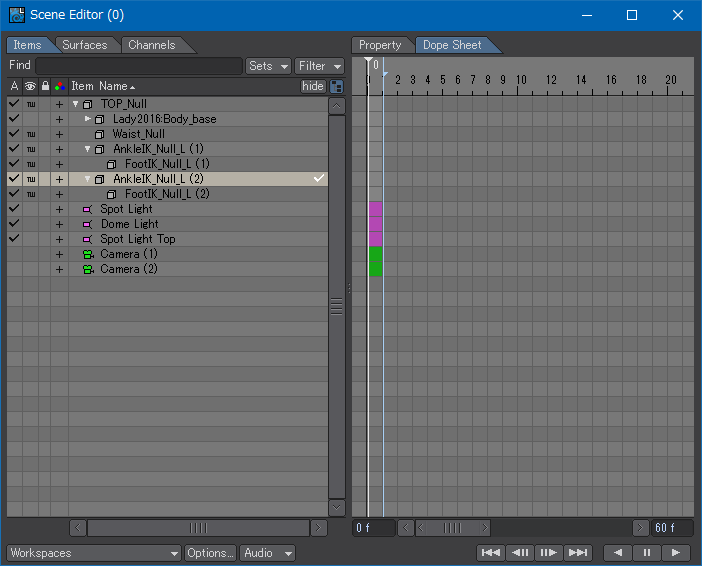
作成したNullオブジェクトに親子関係を結ばせる。TOP_Nullの配下にWaist_Null、ボーンを含むオブジェクト本体、AnkleIK_Null_Lを配置し、AnkleIK_Null_Lの子にFootIK_Null_Lを配置する。次の画像を見てもらったほうが早いだろう。
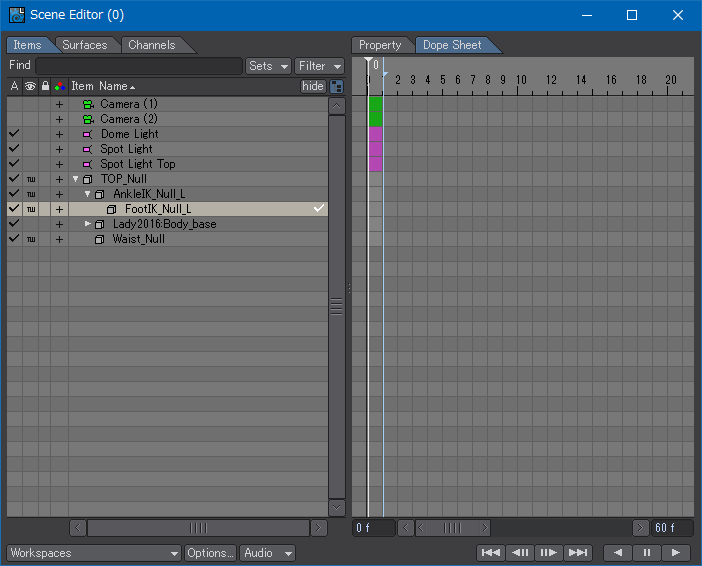
オブジェクトの親子関係の設定にはScene Editorを使うと簡単だけど、うっかり既存の親子関係を壊してしまうと修復に苦労することにもなりかねないため一長一短。モーションオプションの「親アイテム」でも設定できるので、数が少ない場合はこちらを利用したほうが間違いが少なく、結果的に早い場合もある。
これまでは各Nullオブジェクトが独立していたので何の効果もなかったけど、親子関係を結ばせることにより、TOP_Nullを動かせば全体が移動するし、Waist_Nullを動かせばTOP_Nullに重心は拘束されるもののAnkleIK_Null_Lによって足を地面方向に拘束させて胴体を動かせるようになる。
右足IKの設定
左足の設定を右足にも設定する。AnkleIK_Null_Lを選択し、「階層の複製(Clone Hierarchy)」でFootIK_Null_Lと一緒に複製する。
TOP_Nullとの親子関係は維持されるので、Scene Editorで確認するだけでいい。
「AnkleIK_Null_L (2)」と「FootIK_Null_L (2)」をそれぞれ「AnkleIK_Null_R」と「FootIK_Null_R」に名称を変更し、AnkleIK_Null_RのX座標を正負反転させると右足のボーンの上に配置されるので、モーションキーを作成しておく。
右足ゴールオブジェクト
右足のゴールオブジェクトは未設定なので、複製したNullオブジェクトをゴールオブジェクトに設定する。
右足IKの屈伸設定
左足と同様に右足の各ボーンにIKで自動的に屈伸する設定をする。
右足IKの停止設定
左足と同様に、股関節と足首のボーンにIKの及ぶ範囲を設定する。
下半身IKのチェック
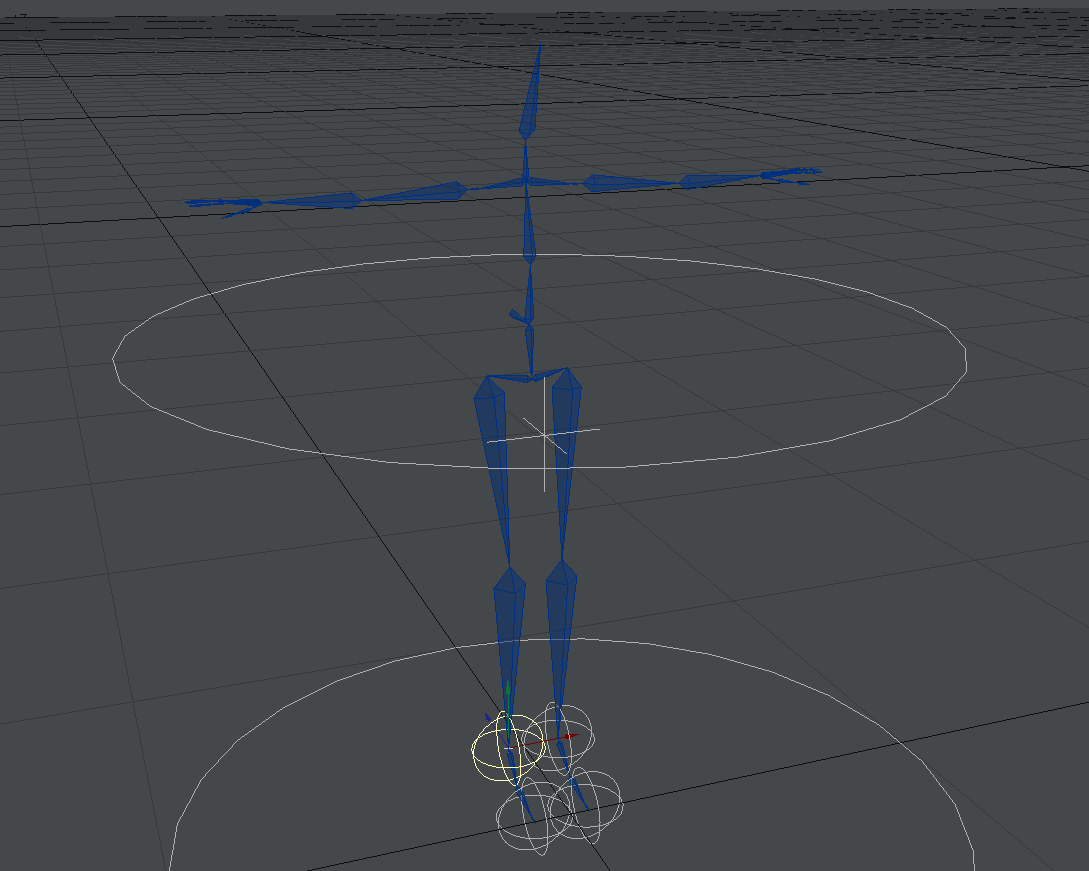
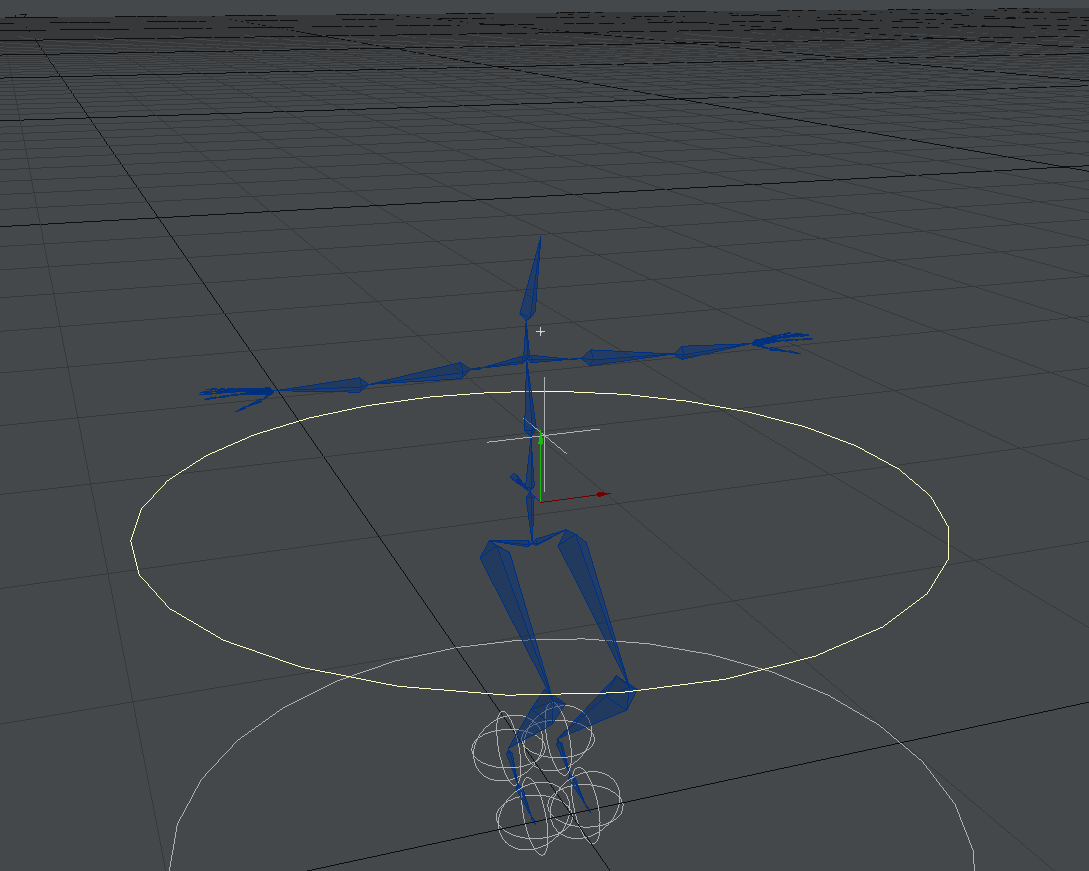
すべての設定が終わったら、シーンを保存する。Waist_Nullを選択し、Y軸方向に動かしてみる。マイナス方向に動かすと足首の位置はほぼそのままに腰を落とし、膝を曲げてしゃがむような姿勢になる。この時点で足を構成するボーン群の動きが左右で食い違っていたり、膝が逆に曲がったり、爪先の方向がおかしかったりした場合はIKの設定をどこか忘れている可能性が高い。
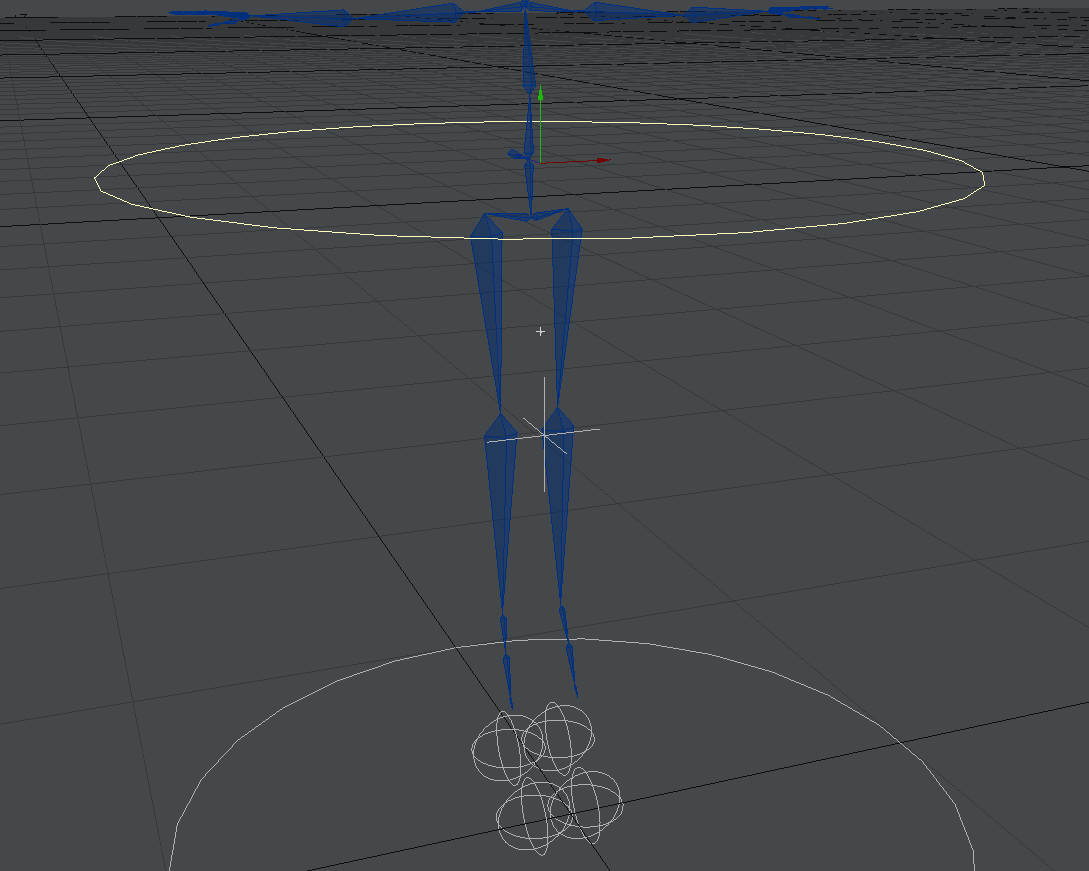
Waist_NullをY軸プラス方向に動かすと足を伸ばし、爪先を下に向けてジャンプする。足首と爪先のボーンはゴールオブジェクトのほうを常に向いているけど接着はしていないので、ゴールオブジェクトを離れることができる。MMDで人物オブジェクトが基幹ボーンをY軸方向に動かすだけでジャンプできたりするのもこれと原理は同じ。
チェックが終わったら、フレームを0から1に移し、再び0に戻すとWaist_Nullは初期位置に戻っている。モーションキー自動作成モードにしていると移動したWaist_Nullの位置に0フレームのキーが作成されてしまうので、別のフレームでチェックする。
途中経過
下半身IK設定完了。下半身のIKが設定されているだけでもポーズはとりやすくなるし、歩行アニメーションを作る時に足が地面から離れないように腰の高さを調節することもできるようになる。
関連記事
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―体編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―手編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―顔編1―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―顔編2―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―髪の毛編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―服装編1―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―服装編2―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―服装編3―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―ボーン編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―ボーンウェイト編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―UV編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―下半身IK編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―上半身IK編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―ClothFX編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―unReal Xtreme2編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―肌の質感編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―続・髪の毛 HairBlade編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―瞳編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―まつ毛編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―GENOMA2編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―手指FK編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―プリーツスカート編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―表情モーフ編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―視線コントロール編―