最終更新:2016/09/06
上半身のIKを設定する。上半身系のボーン構造は次のとおりになっていることを前提とする。手首から下のボーンは今回のIKには関係ないけど、すべて記載した。
- Root
- Spine
- Breast
- Chest_L
- ChestIK_L(IK用)
- Upper_Arm_L
- Lower_Arm_L
- Wrist_L(IK用)
- Hand1_L
- Finger11_L
- Finger12_L
- Finger11_L
- Hand2_L
- Finger21_L
- Finger22_L
- Finger23_L
- Finger22_L
- Finger21_L
- Hand3_L
- Finger31_L
- Finger32_L
- Finger33_L
- Finger32_L
- Finger31_L
- Hand4_L
- Finger41_L
- Finger42_L
- Finger43_L
- Finger42_L
- Finger41_L
- Hand5_L
- Finger51_L
- Finger52_L
- Finger53_L
- Finger52_L
- Finger51_L
- Hand1_L
- Wrist_L(IK用)
- Lower_Arm_L
- Upper_Arm_L
- ChestIK_L(IK用)
- Chest_R
- ChestIK_R(IK用)
- Upper_Arm_R
- Lower_Arm_R
- Wrist_R(IK用)
- Hand1_R
- Finger11_R
- Finger12_R
- Finger11_R
- Hand2_R
- Finger21_R
- Finger22_R
- Finger23_R
- Finger22_R
- Finger21_R
- Hand3_R
- Finger31_R
- Finger32_R
- Finger33_R
- Finger32_R
- Finger31_R
- Hand4_R
- Finger41_R
- Finger42_R
- Finger43_R
- Finger42_R
- Finger41_R
- Hand5_R
- Finger51_R
- Finger52_R
- Finger53_R
- Finger52_R
- Finger51_R
- Hand1_R
- Wrist_R(IK用)
- Lower_Arm_R
- Upper_Arm_R
- ChestIK_R(IK用)
- Neck
- Head
- Chest_L
- Breast
- Spine
以下、特に断りがない限り、0フレームで操作する。
左腕IKの設定
腕のIK設定のおおまかな流れは足とほぼ同様で、ゴールオブジェクトになるNullオブジェクトの作成、IK用のボーンからゴールオブジェクトを参照する設定、IKで動くボーンの指定、及びIKが及ぶ範囲の限定という4つの手順からなる。
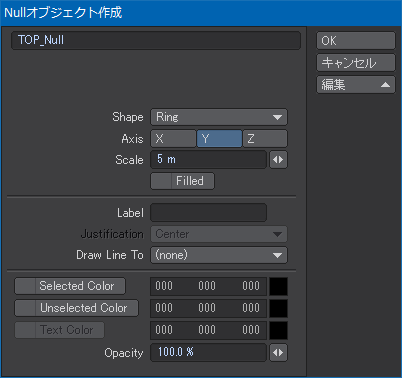
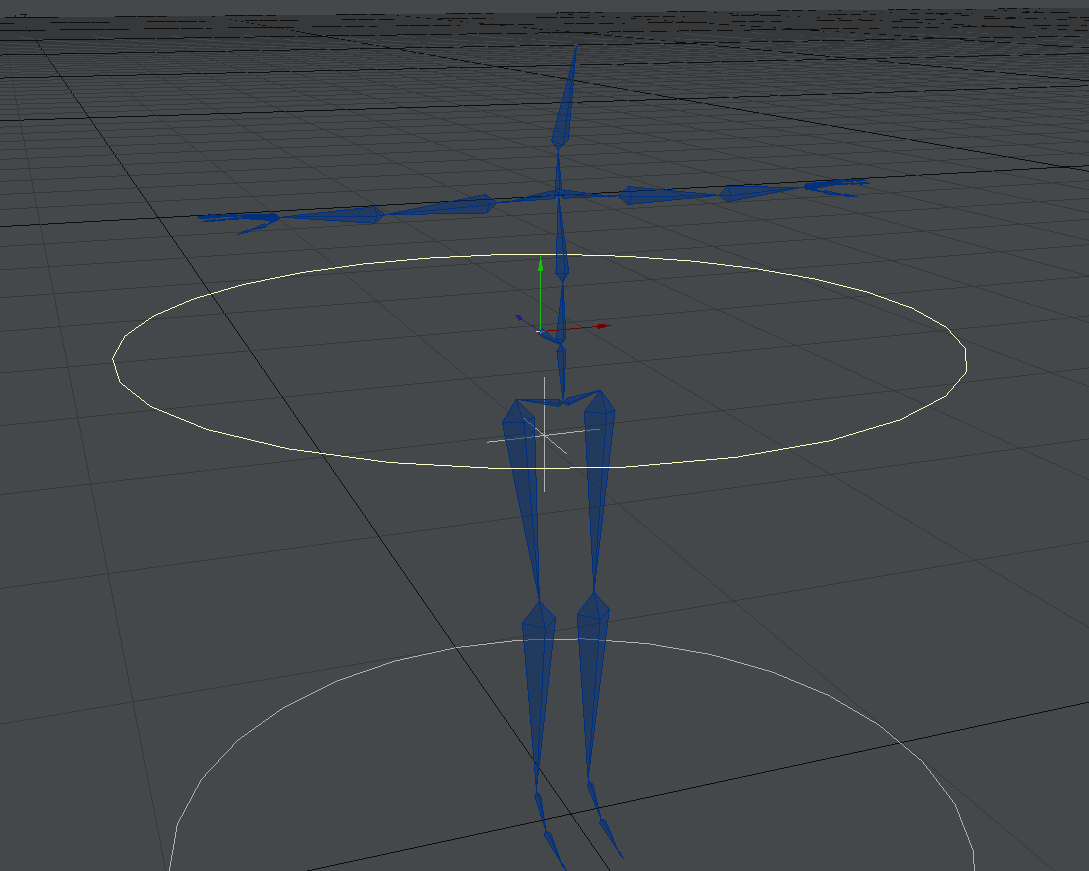
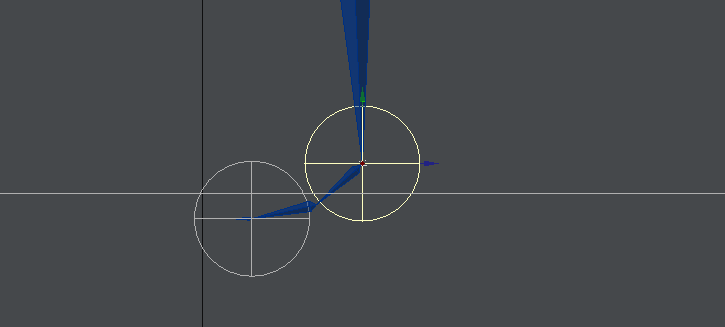
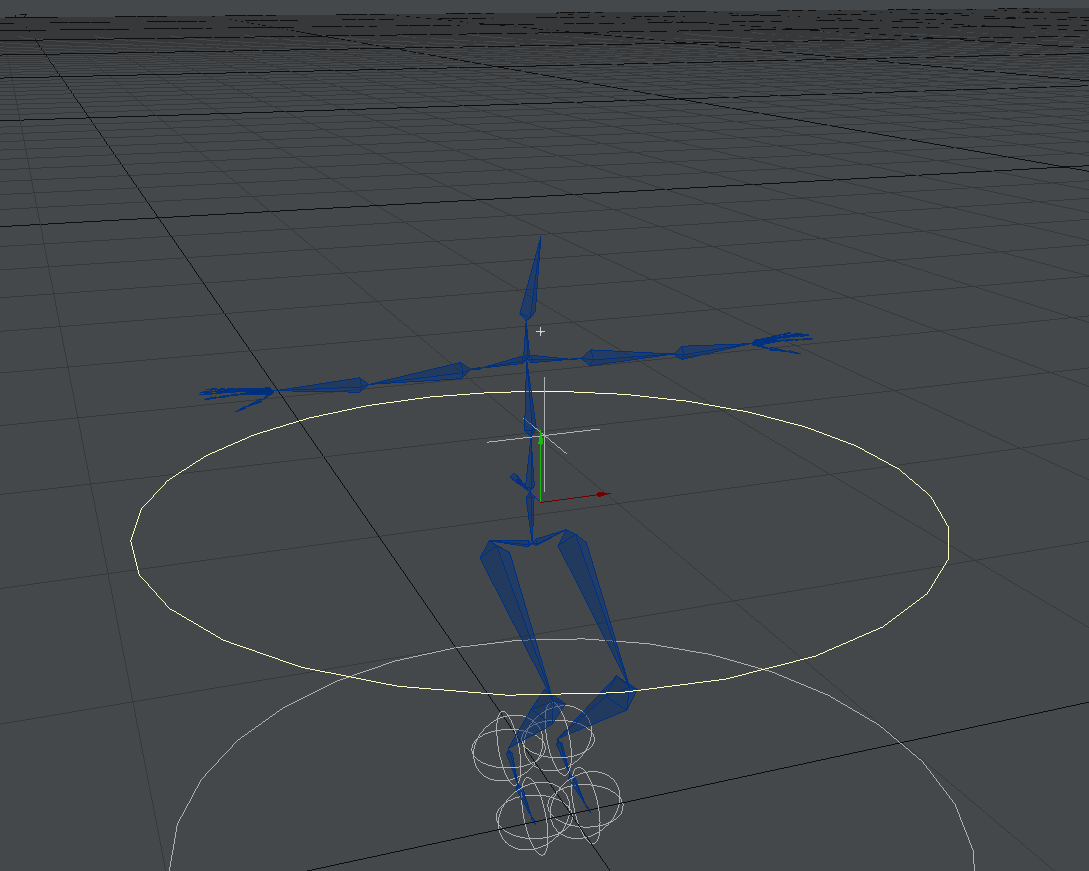
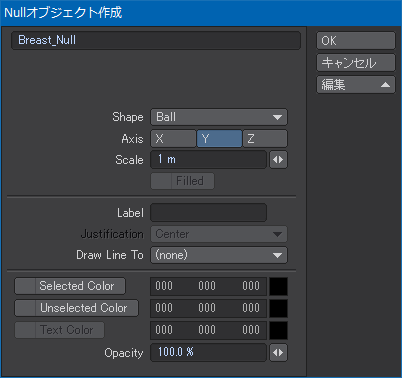
まず、胸の位置に新しいNullオブジェクト「Breast_Null」を作成する。
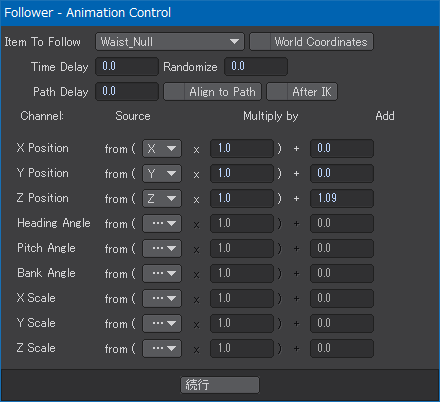
Breast_Nullを下半身IKで作成したWaist_Nullの子オブジェクトにする。
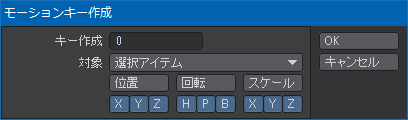
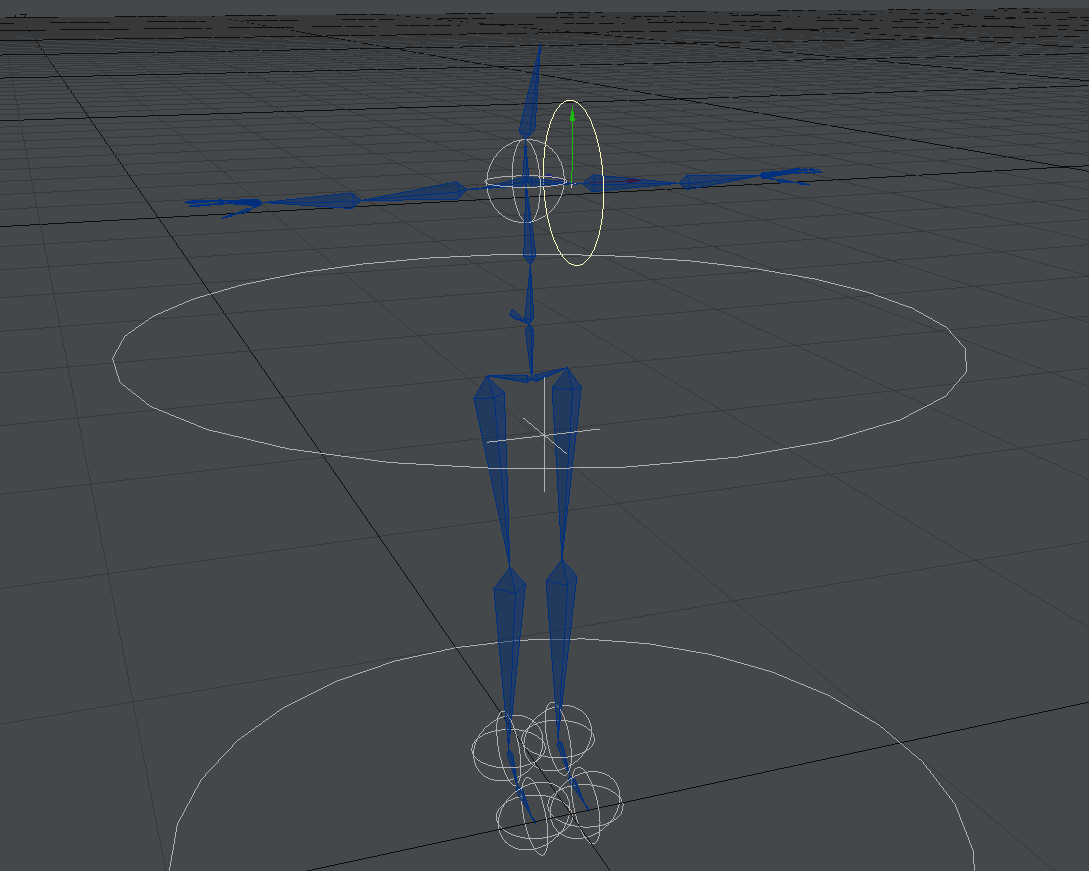
Altキーを押しながらBreast_Nullを移動させ、Neckボーンの根元にスナップさせる。位置が決まったら、モーションキーを作成しておく。
左腕ゴールオブジェクト
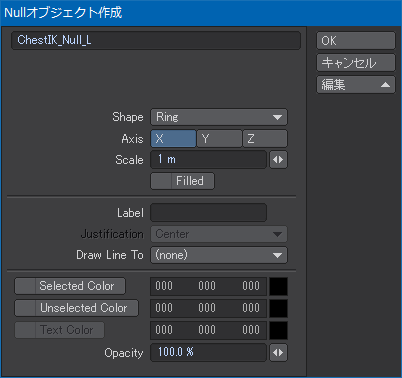
次に、左肩コントロール用のNullオブジェクトを作成する。名称は「ChestIK_Null_L」とした。腕はX軸方向に伸びているので、向きがわかりやすいように「Axis」を「X」にした。
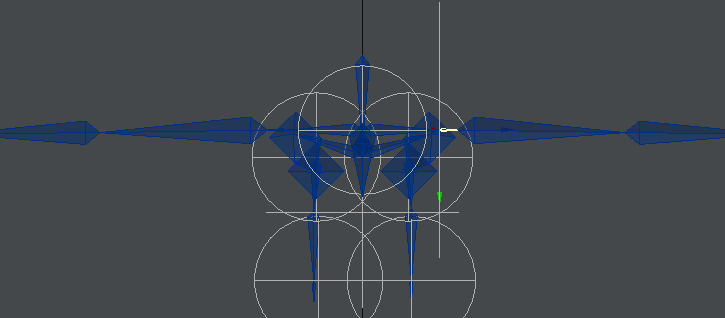
ChestIK_Null_LをChestIK_Lボーンの根元にスナップさせ、モーションキーを作成する。
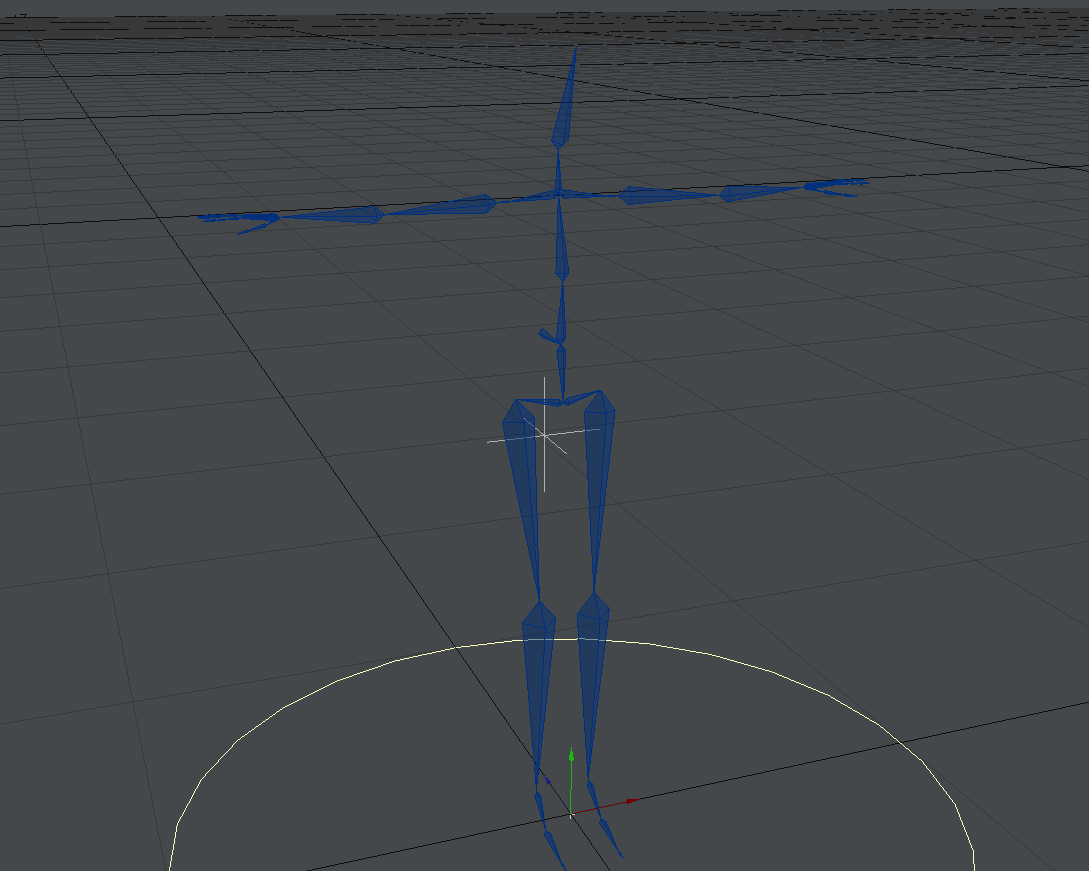
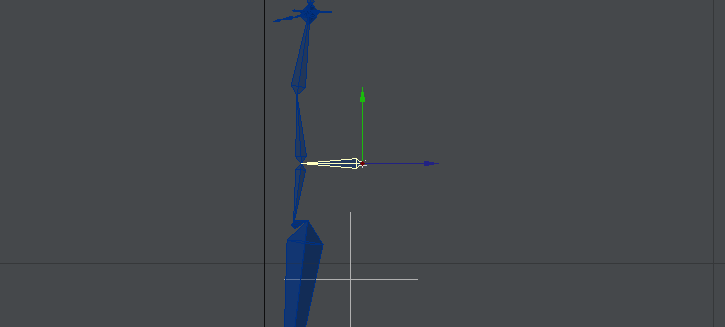
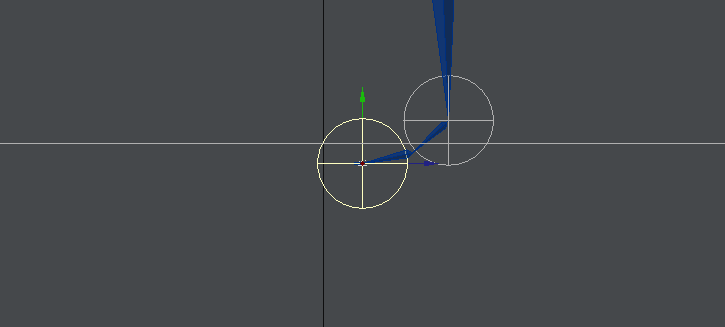
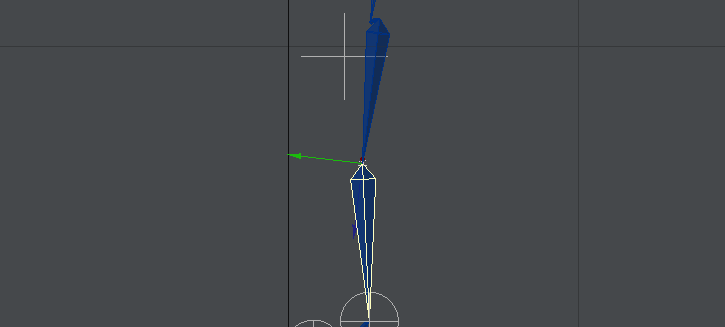
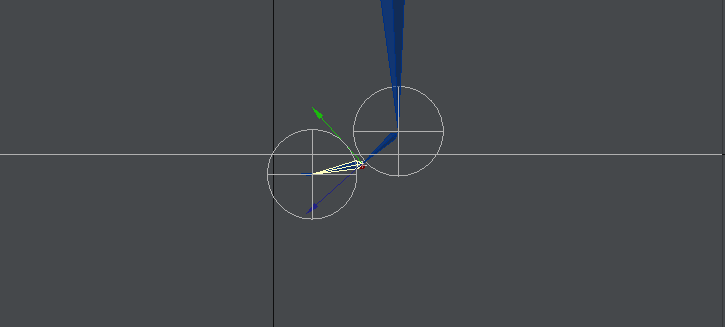
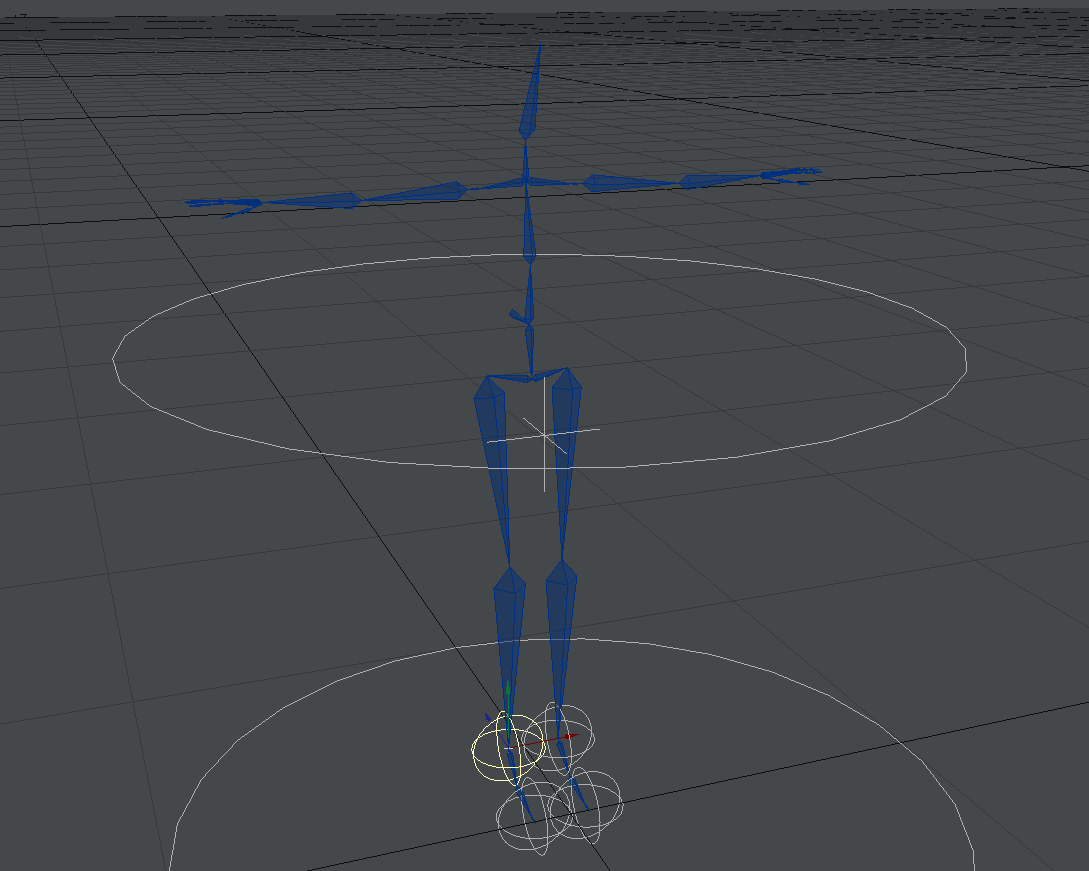
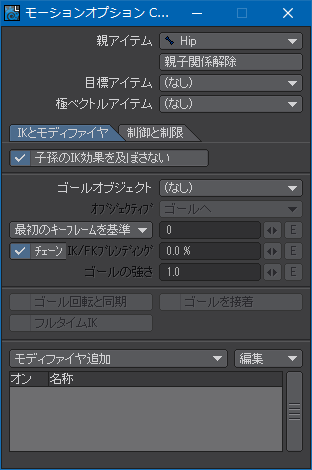
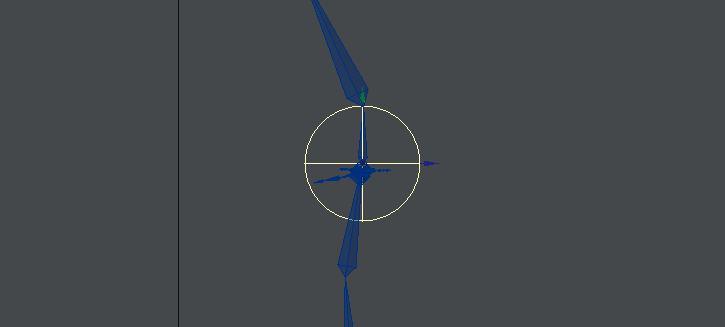
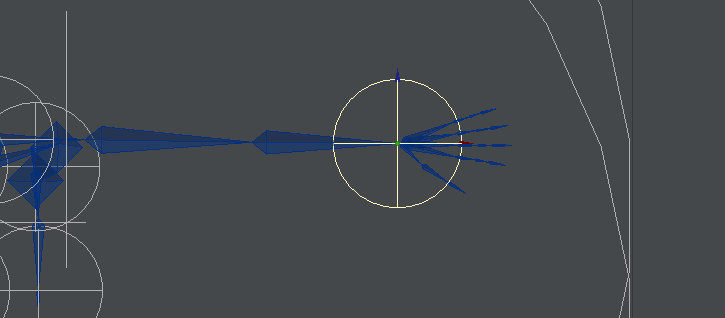
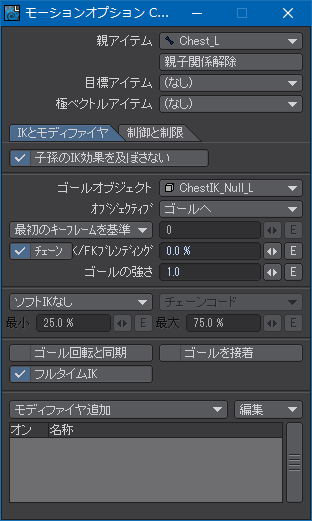
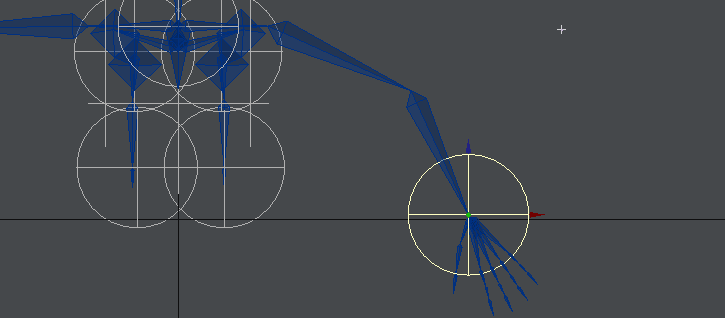
ChestIK_Lボーンを選択する。IK用のボーンでモデルのボーン・ウェイトに極力影響を与えないように短くしているため少しわかりにくいけど、次の画像の位置にある。
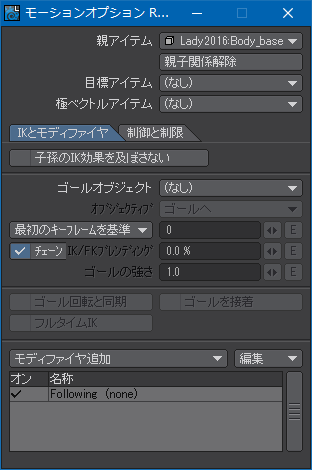
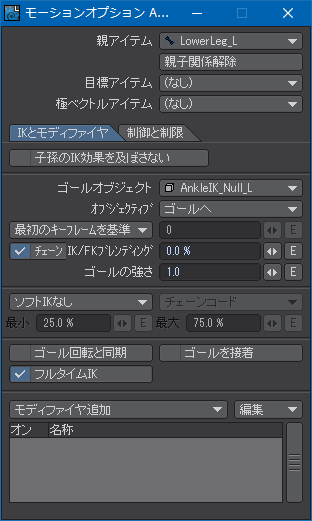
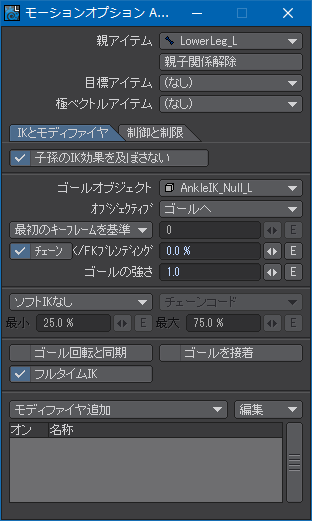
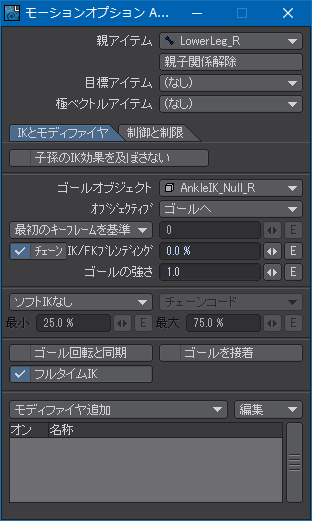
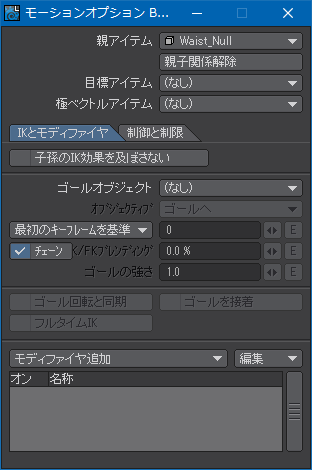
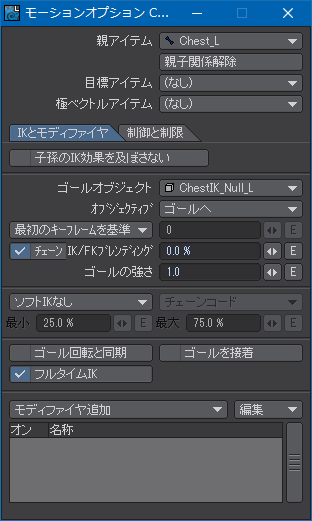
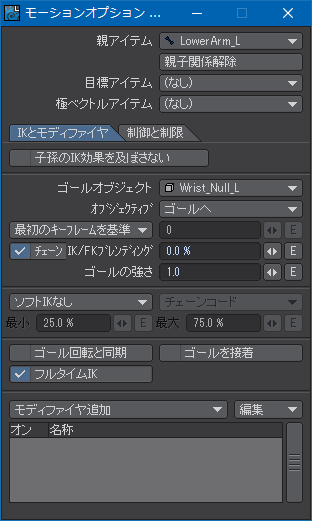
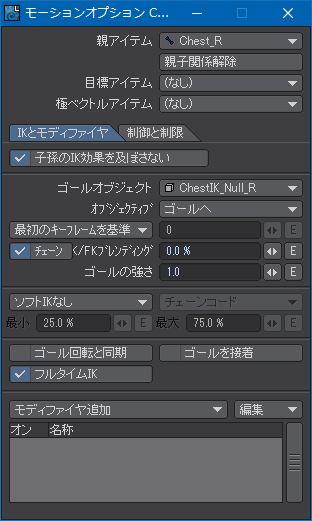
モーションオプション(Mキー)を開き、「ゴールオブジェクト」をChestIK_Null_Lに指定する。
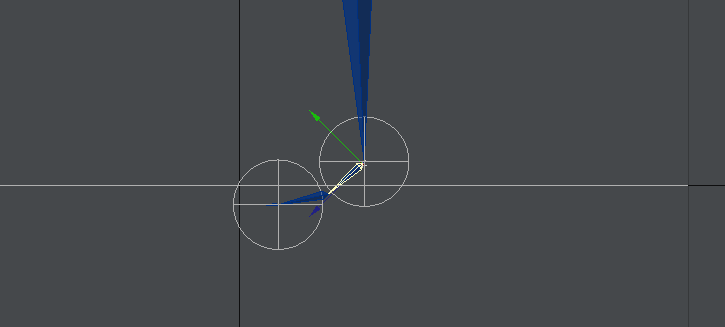
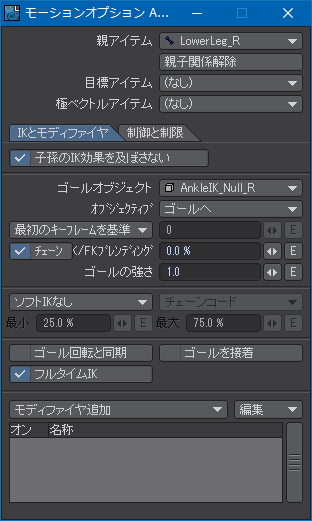
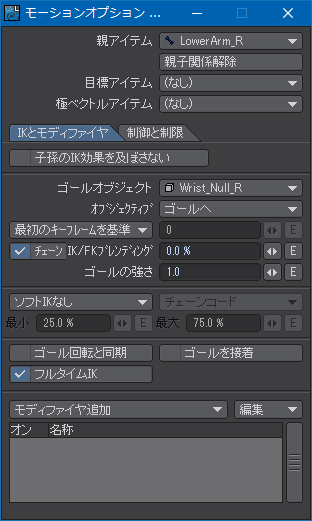
「Wrist_Null_L」オブジェクトを作成し、Wrist_Lボーンの根元にスナップさせる。
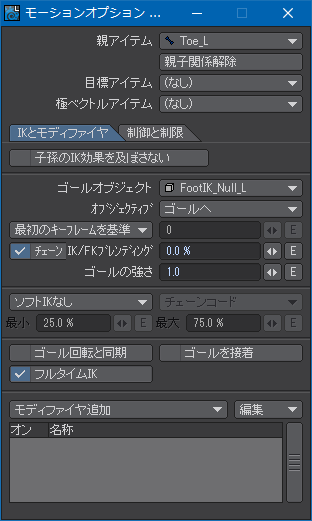
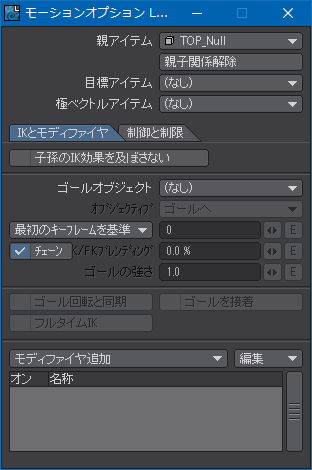
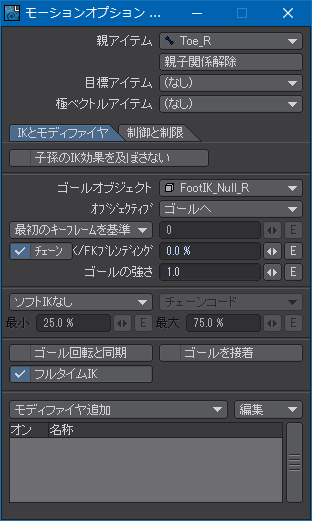
Wrist_Lボーンを選択し、モーションオプション(Mキー)で、「ゴールオブジェクト」をWrist_Null_Lに指定する。
左腕IKの屈伸設定
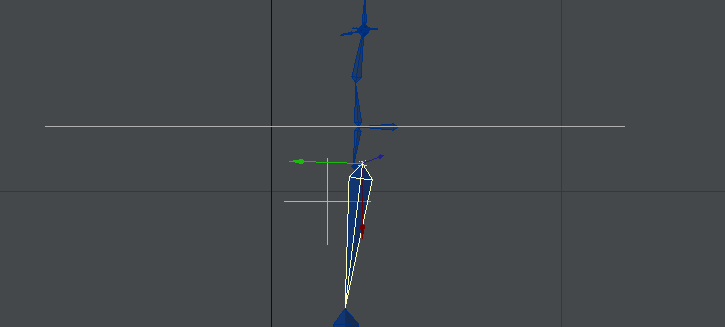
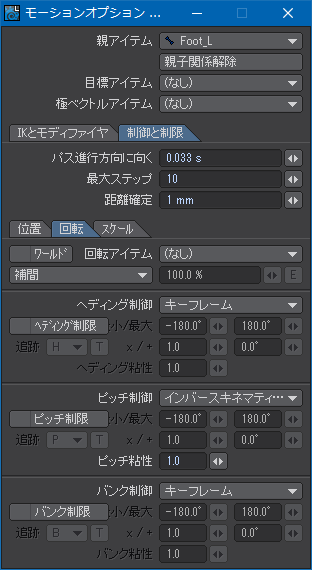
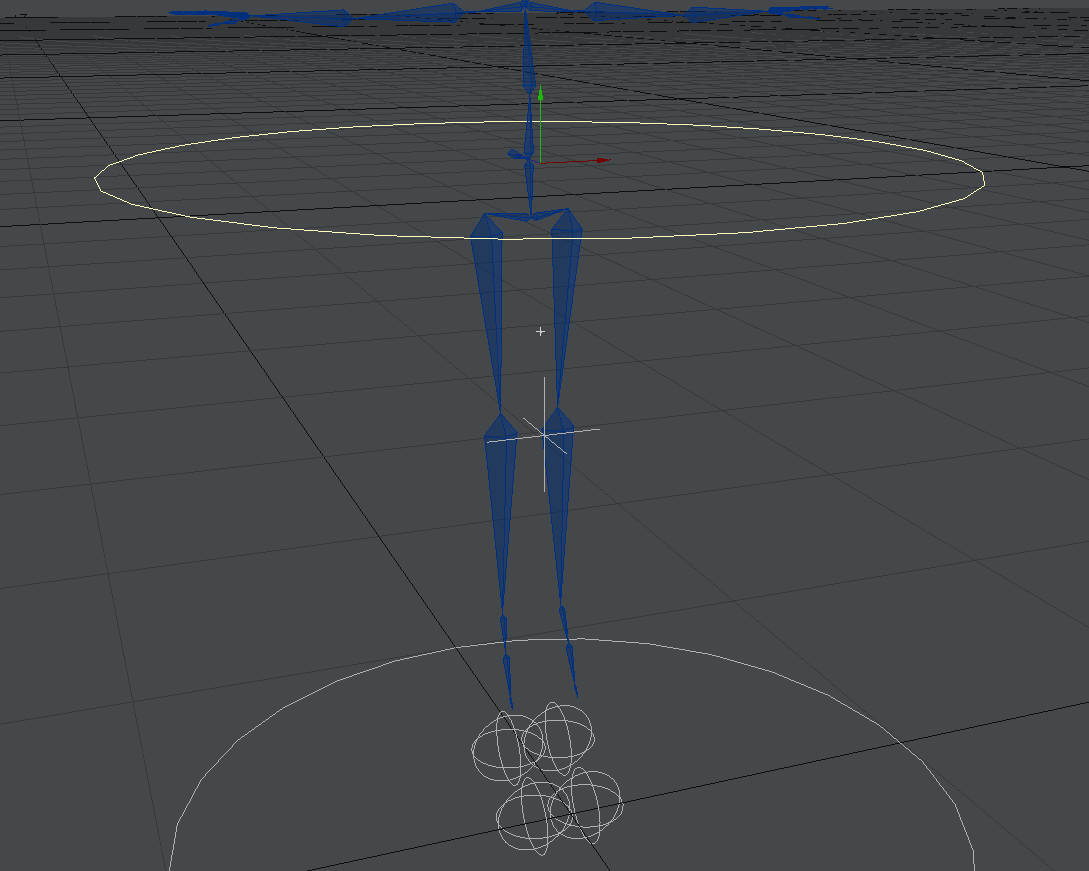
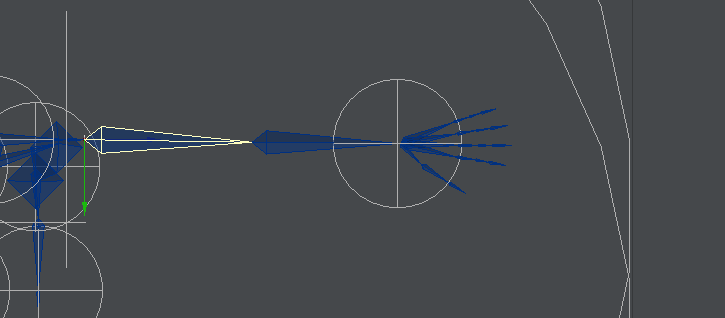
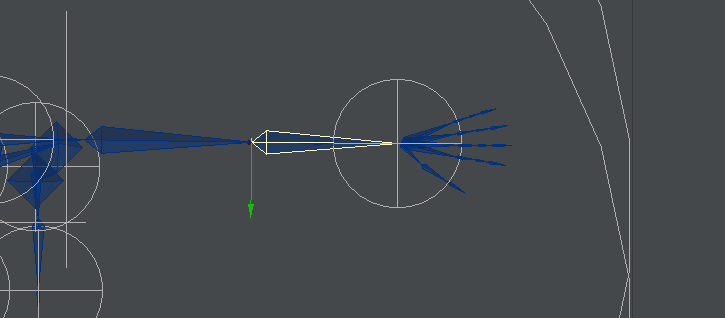
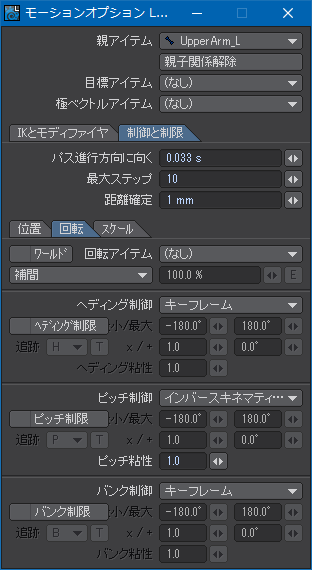
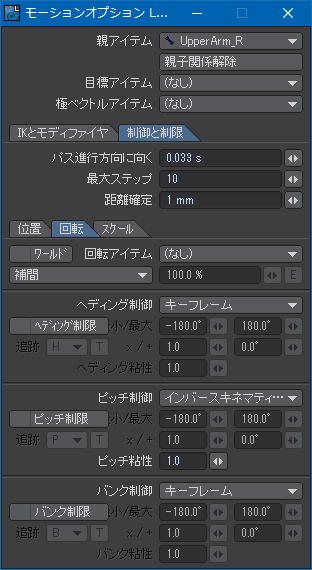
IKで自動的に屈伸するボーンを指定する。左上腕にあたるUpper_Arm_Lボーンを選択する。
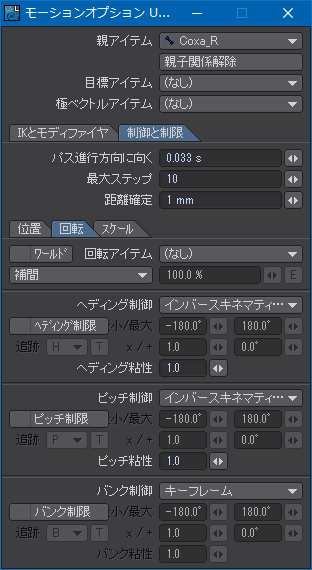
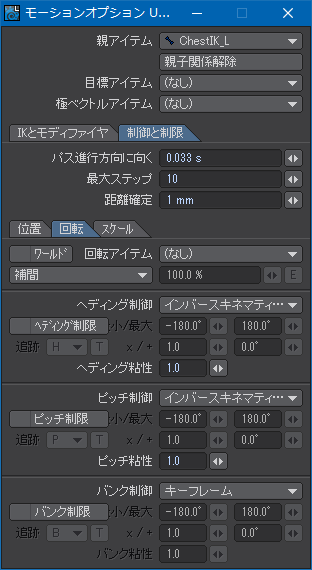
モーションオプション(Mキー)で「制御と制限」タブを選択し、「ヘディング制御」と「ピッチ制御」を「インバースキネマティクス」に指定する。バンク制御は変更しない。肩関節にあたる部分の設定で、腕の垂直方向に上げ下ろしする方向と、水平方向に広げる方向の両方についてIKを有効にする。
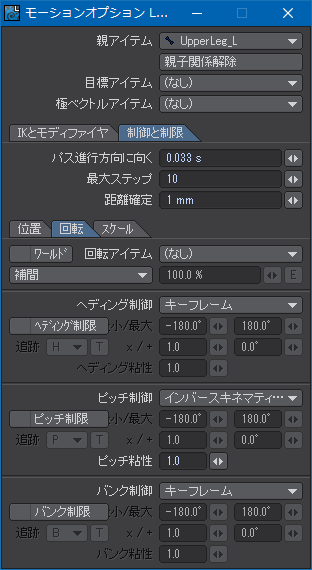
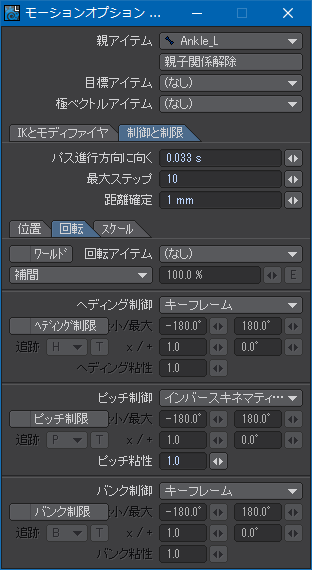
続けて左下腕にあたるLower_Arm_Lボーンを選択する。
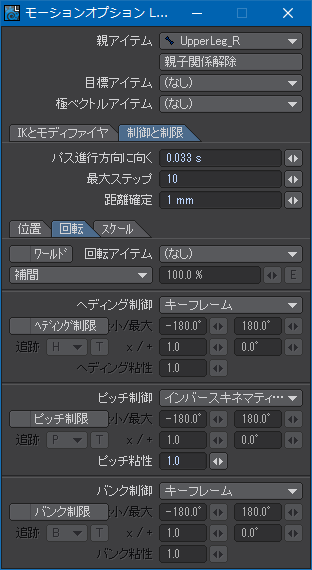
モーションオプション(Mキー)の「制御と制限」タブで「ピッチ制御」のみを「インバースキネマティクス」に指定する。ヘディング制御及びバンク制御は変更しない。肘は曲がる方向が決まっているので、前後に曲げる方向だけに制限する。
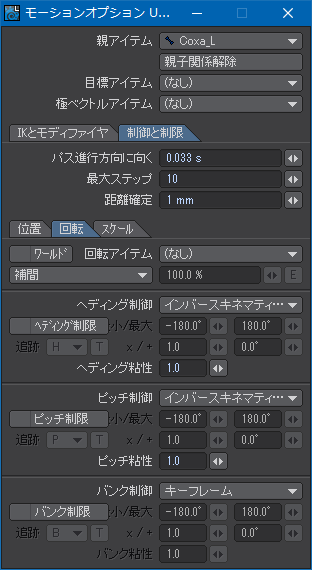
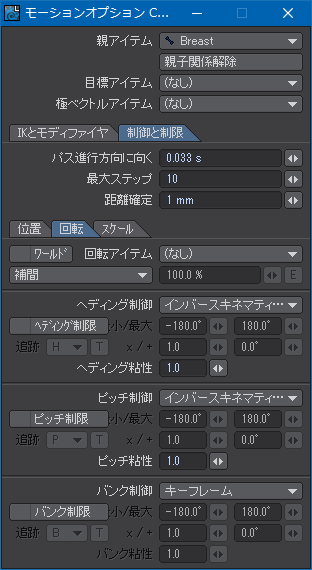
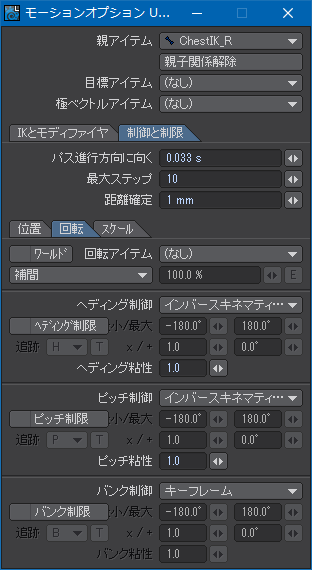
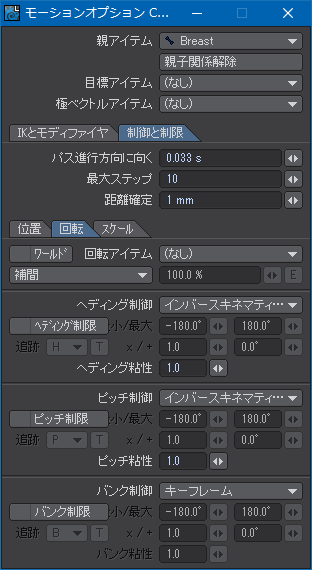
最後に左肩に相当するChest_Lボーンを選択する。
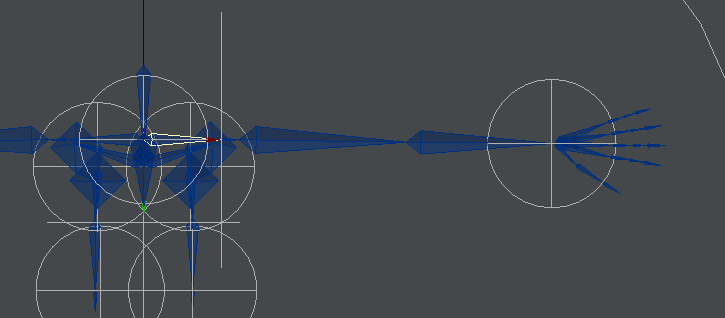
モーションオプション(Mキー)で「制御と制限」タブを選択し、「ヘディング制御」と「ピッチ制御」を「インバースキネマティクス」に指定する。バンク制御は変更しない。鎖骨にあたる部分の設定で、腕に連動して肩を動かすことができるようになる他、肩で息をするような肩だけ上下させるような動作が可能になる。
左腕IKの停止設定
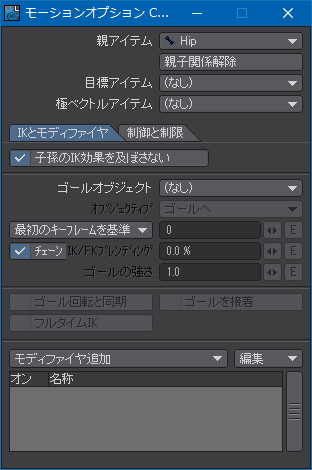
再びChestIK_Lボーンを選択し、モーションオプション(Mキー)で「子孫のIK効果を及ぼさない」にチェックする。これでWrist_Null_Lの移動によるIKの影響範囲は肩までに限定される。
親子関係の設定
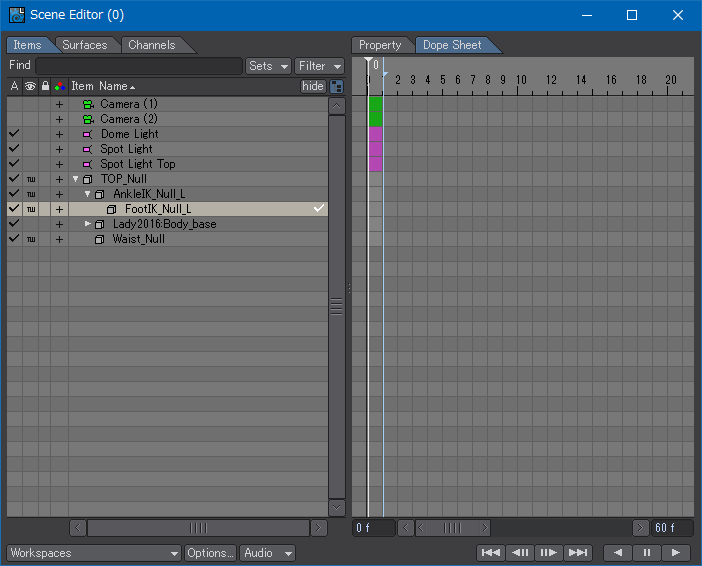
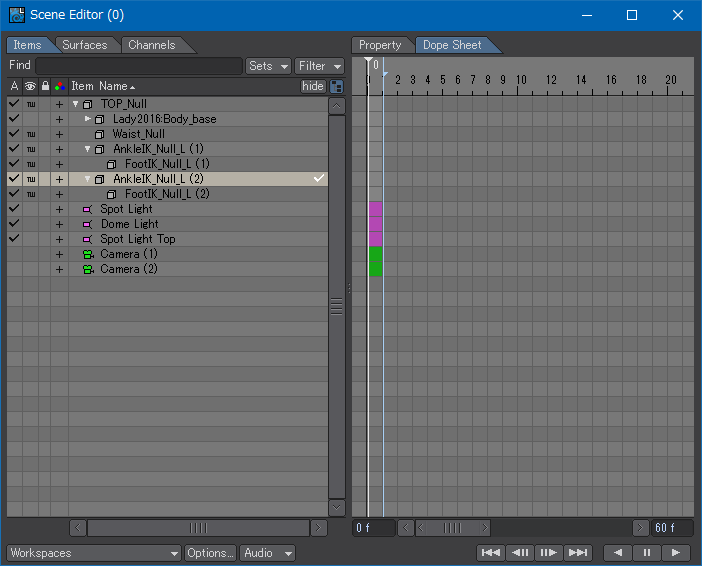
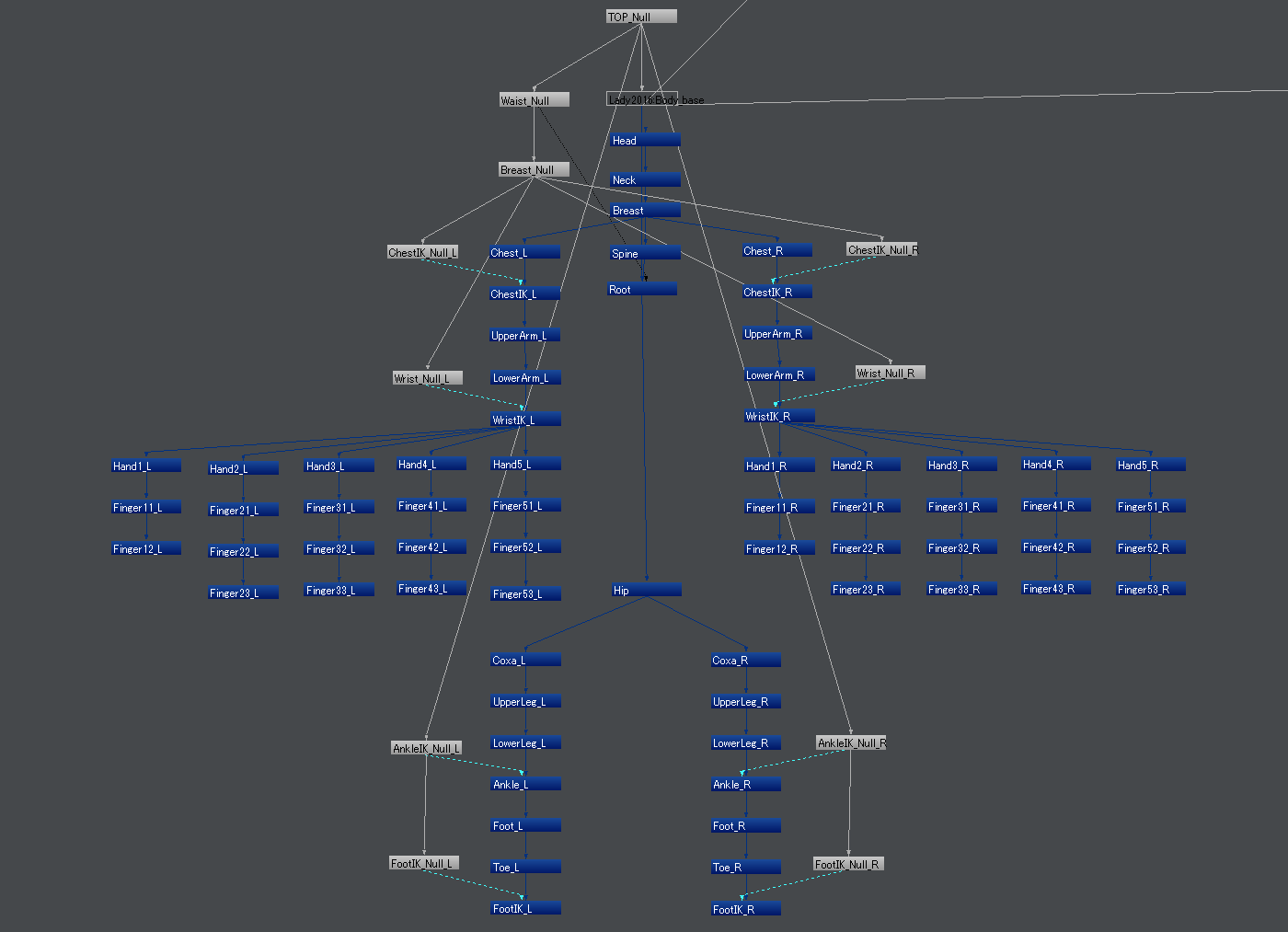
作成したNullオブジェクトに親子関係を結ばせる。次の画像をとおり、Waist_Nullの配下にBreast_Nullを配置し、Breast_Nullの子にChestIK_Null_LとWrist_Null_Lを配置する。
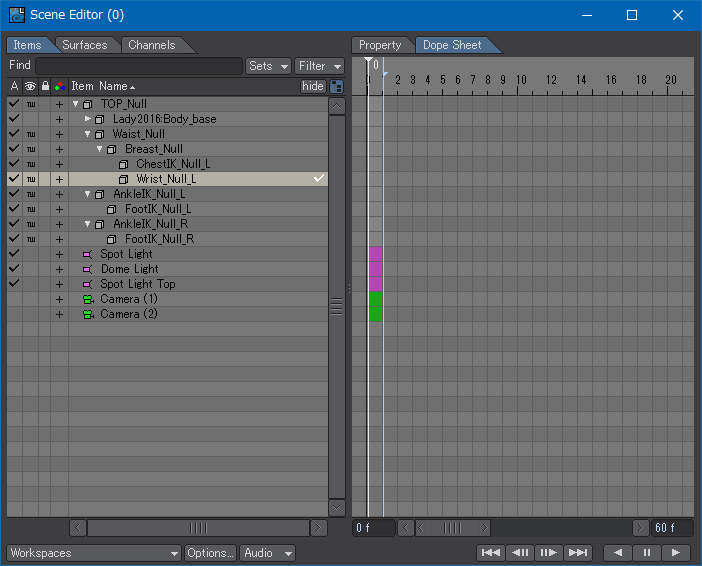
足と異なるのは、肩と手首のNullオブジェクトに親子関係を結ばせないという点。足の場合は足首に必ず爪先が追随してくることを前提としているけど、手首が必ずしも肩に追随しない設定になっている。
右腕IKの設定
左腕の設定を右腕にも設定する。ChestIK_Null_LとWrist_Null_Lをそれぞれひとつずつ複製(Ctrl+C)し、X座標を反転させて右腕のゴールオブジェクトを作成する。名称をそれぞれChestIK_Null_RとWrist_Null_Rに変更し、モーションキーを作成しておく。
右腕ゴールオブジェクト
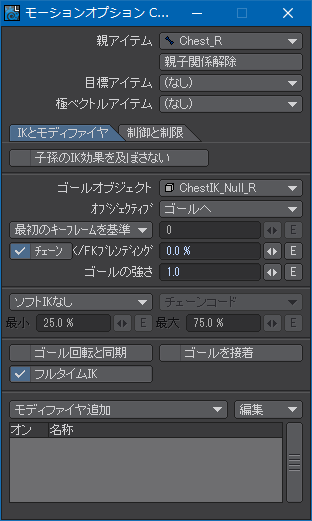
右腕のゴールオブジェクトは未設定なので、ChestIK_LボーンとWrist_Lボーンを選択し、それぞれ次の画像のように複製したNullオブジェクトをゴールオブジェクトに設定する。
右腕IKの屈伸設定
左腕と同様に右腕の各ボーンにIKで自動的に屈伸する設定をする。
右腕IKの停止設定
左腕と同様に、肩関節のボーンにIKの及ぶ範囲を設定する。
上半身IKのチェック
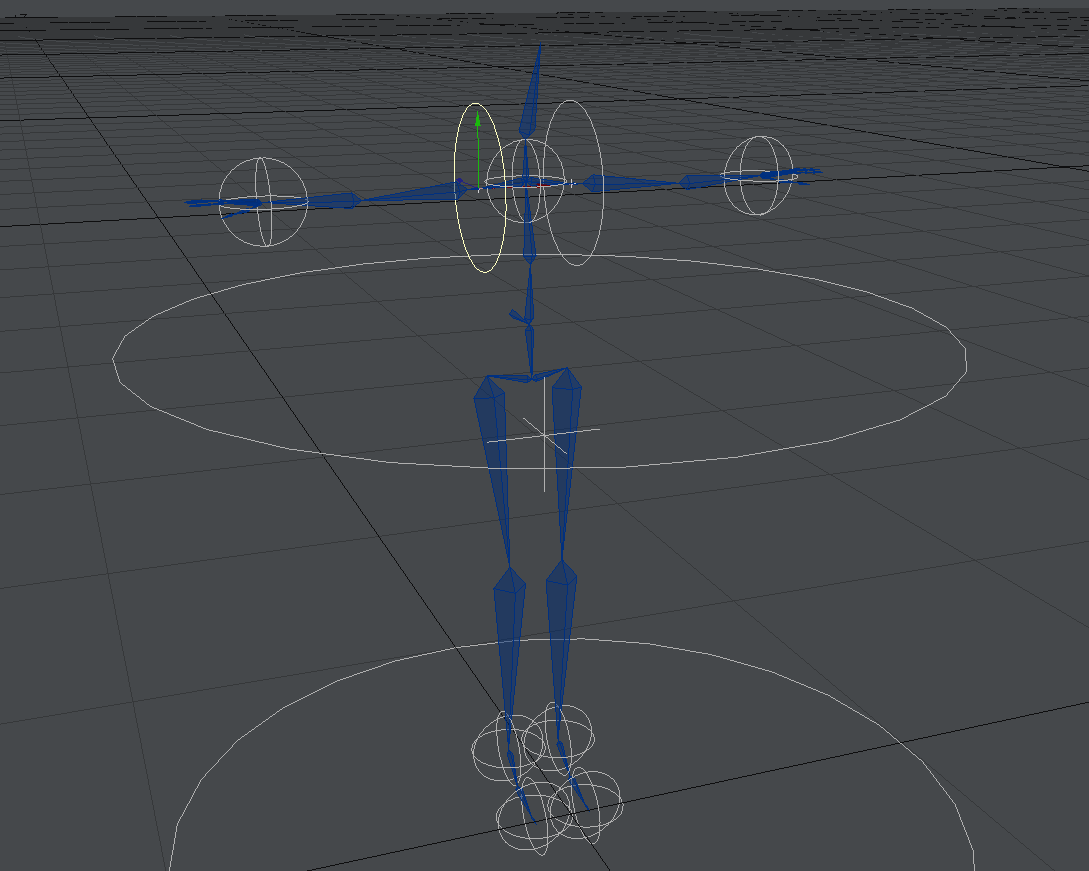
すべての設定が終わったら、シーンを保存する。Wrist_Null_L又はWrist_Null_Rを選択し、XZ平面方向に動かしてみる。肩を軸にして肘が曲がってくれたら成功。手首のNullオブジェクトの移動につられて肩のボーンも動いてしまう場合は肩のIK停止設定を忘れている可能性が高い。
チェックが終わったら、フレームを0から1に移し、再び0に戻すとWrist_Null_L/Rは初期位置に戻っている。モーションキー自動作成モードにしていると移動したNullオブジェクトの位置に0フレームのキーが作成されてしまうので、別のフレームでチェックする。
スケマティックビューの整理
オブジェクト本体から読み込まれたボーン構造は、最初はスケマティックビューで一列の直線状に並んでいるので、左右にわけて階層構造がわかりやすいように並べ替えておくと後でモデルに動きをつけたい時にボーンやオブジェクトを視覚的に探すのが容易になる。
ウェイトの正規化
チェックが済んだら一時退場させていたオブジェクト本体を表示し、0フレーム以外の任意のフレームに移動する。一連の操作で作成した各ゴールオブジェクトを動かすとモデルに様々なポーズをとらせることができるようになっているはずだ。
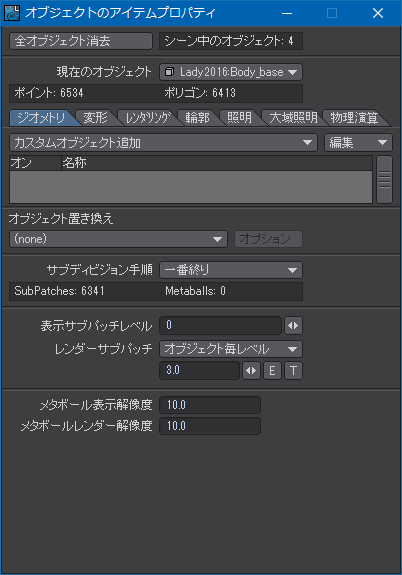
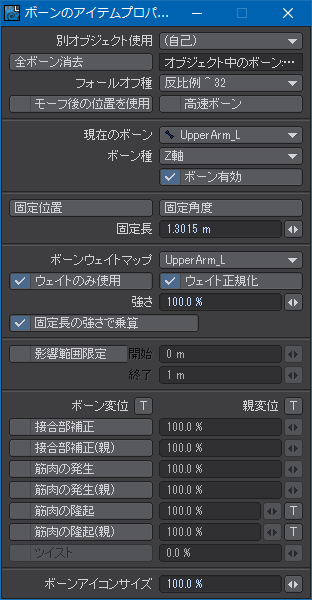
ただ、肩関節など大きく動く箇所でモデラーのVertex Paintで設定したボーン・ウェイトのとおりに変形してくれないことがある。そういう場合は、対象のボーンのアイテムプロパティを開き、次の画像のように「フォールオフ種」が「反比例 ^ 32」になっているか確認し、「ウェイトのみ使用」と「ウェイト正規化」にチェックを入れると大抵の場合改善する。
回避方法はあるとしても、レイアウトの独立という特徴を持ちながら、モデラーの設定と同期できていないという難点がある。また、標準機能のボーンを使用していると、リグを途中で変更したくなった時に一度すべてのボーンを入れ換えてから再設定しなければならないという問題もある。これらの問題がLightWaveをアニメーション制作用のツールとしての第一線から遠ざけている要因にもなっている。これらの問題を解決するリグ用ツールとしてLightWave 11からGENOMA/GENOMA2が追加されたけど、実用例が少ない上に、詳細に解説した書籍がないため、一般に広く知られた機能とまでは言い難い。
途中経過
IKの効果を端的に示しているかどうかは微妙だけど、背骨にもIKを組み込み、胸を反らした姿勢ができるようになった。また、腰コントロールにより足にポーズをつけても地面との距離の調整が容易になった。今までは何もない空白の空間に立たせていたけど、地面と背景に相当するオブジェクトを追加してみた。足下に影が落ちてようやくCGらしくなってきた。

補足
今回のIKでは指に関する設定をしていない。指は関節が集中する箇所なので、5本の指にそれぞれIKを設定すれば指先のゴールオブジェクトを動かすだけで良くなり、キーフレームの操作が楽になるだろうと考えるのが人情というもの。しかし、指の関節は他の指の動きによっても動きを制限されたり、力の入れ具合によってはすべての関節が均等に曲がるとは限らないため、IKに適さないことが多い。もちろん、目的によりけりの部分も大いにあるため、アニメーションを作る上で指の動きが大きなウェイトを占めるのであれば、指のモーションの効率化が課題になるので指のIK設定に挑戦してみてもいいかもしれない。
それから、背骨に関するIKの設定もしていない。Breast_Nullオブジェクトはゴールオブジェクトに指定されていないため、上半身をWaist_Nullに追従させることと両肩をリンクさせて同時に動かすためだけにしか使われていない。背骨にもIKを設定すればBreast_Nullをゴールオブジェクトとして胸を反らしたり前屈みの姿勢をとらせることもできるようになる。
手順は多いけど、ボーン単位でテクニカルに設定できるので、一度慣れてしまえばボーン・ウェイトをポリゴン単位で緻密に設定するよりは精神的疲労は少ない。惜しむらくは片側の設定を反対に対称コピーする方法がLightWave標準機能にはないことくらいか。各関節の可動角度の制限も特にしていないので、あまり極端なポーズをとらせると関節が逆に曲がることもあり、これでも必要最小限。
もちろん、IKにも欠点はある。FKは特に何も設定しなくてもモデルをとりあえず動かすことができるのに対し、あらかじめIKを使う設定を一定の手続きに従って済ませておかなければならないし、上位階層の構造が制作者の思ったように動いてくれないケースもある。
IKを設定したからといって万全というわけでもなく、膝を外に向けて歩く「がに股」歩行やバトルシーンのような大胆なアクションには対応できないこともある。爪先のゴールオブジェクトが邪魔に思えることもあるだろう。リギングのみを専門に担当するエンジニアがいると言われるくらいなので、目的に応じたIKの設定が必要になるわけだけど、基礎さえおさえておけば工夫のしようもある。LightWaveではIKで実現できない部分にFKをブレンドすることもできるけど、高度なのでここでは割愛する。
そういった短所があるとしても、部分的にでもIKを取り入れると後の作業効率は劇的に改善する。
関連記事
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―体編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―手編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―顔編1―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―顔編2―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―髪の毛編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―服装編1―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―服装編2―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―服装編3―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―ボーン編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―ボーンウェイト編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―UV編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―下半身IK編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―上半身IK編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―ClothFX編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―unReal Xtreme2編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―肌の質感編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―続・髪の毛 HairBlade編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―瞳編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―まつ毛編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―GENOMA2編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―手指FK編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―プリーツスカート編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―表情モーフ編―
- LightWaveで二次元キャラ系人物モデリング奮闘記 ―視線コントロール編―
 前置きはこのくらいにして、レイアウトを起動する。まず最初に、「その場でペアレント(Parent in Place)」がオンになっているかどうかを確認する。オフになっている場合はボタンをクリックし、トグルしてオンにしておく。
前置きはこのくらいにして、レイアウトを起動する。まず最初に、「その場でペアレント(Parent in Place)」がオンになっているかどうかを確認する。オフになっている場合はボタンをクリックし、トグルしてオンにしておく。